
ESA has issued an Invitation to Tender (ITT) to design and develop a breadboard of a Capture equipment bay for an Active Debris Removal chaser satellite, with the aim of verifying, through testing, the functional and performance requirements of Design for Removal technologies that are being embarked in the six upcoming Copernicus Expansion missions.
The six Copernicus Sentinels Expansion missions have adopted the Design for Removal Interface Requirements Document (IRD) that ESA has developed. The Agency is taking a proactive and innovative approach by preparing the up to 2000 kg satellites for a possible removal as part of the End-of-Life management which in the future may be adopted by other satellites.
In the frame of Design for Removal (D4R) ESA is implementing several activities to mature the requirements, such as:
- technologies that will support rendezvous and capture e.g. a mechanical interface for capture, passive spacecraft detumbling after End of Life, markers to support the rendezvous and tracking from ground
- interface and performance requirements covering aspects such as: configuration of markers, keep-out-zones for the servicer satellite operation during rendezvous and capture.
In parallel to this, over the past few years, ESA has invested in several technologies required for the Active Debris Removal (ADR) servicer satellite such as:
- cameras for rendezvous,
- clamping mechanisms to support disposal loads,
- grippers for performing capture and hexapods.
Such equipment must work in combination with the D4R equipment to achieve all the required functionalities for a removal mission.
The current ITT aims at bridging the work done by ESA in the areas above through an end-to-end test involving the complete integration of both the Design for Removal technologies and on the other side all of the equipment required to support the in-orbit monitoring of the client and capture. This will allow us to consolidate the Design for Removal IRD, in particular regarding the requirements verification approach, mature the technologies for a servicer satellite and to develop a path to flight for the equipment.
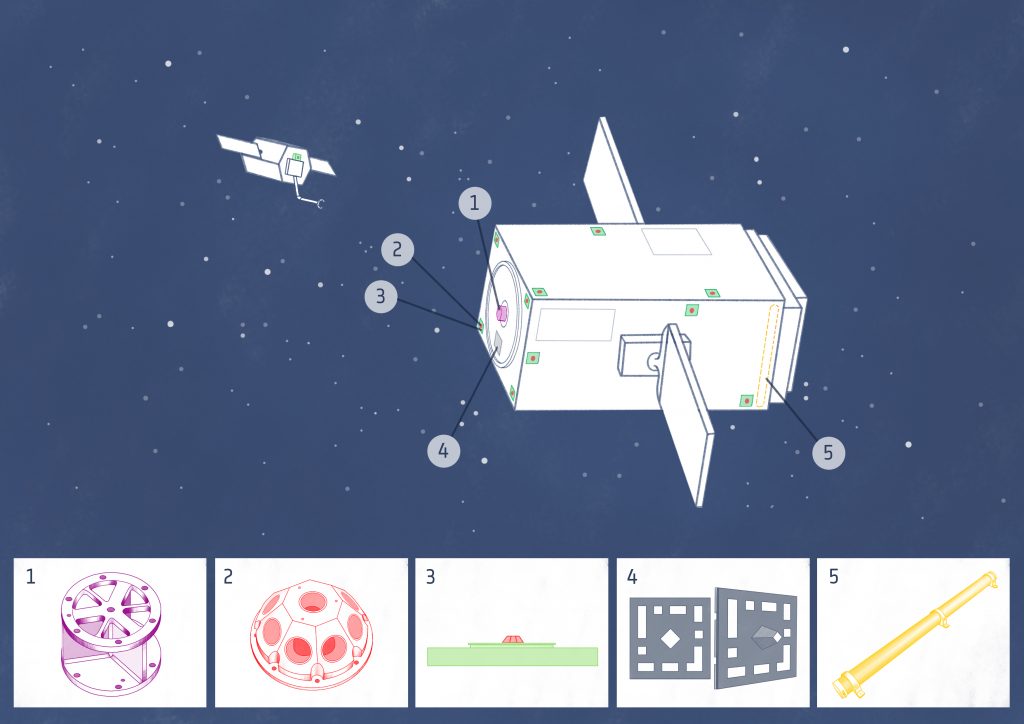
The activity focuses only on the final capture phase of a removal mission, from 5 m distance, and the post-capture/stabilisation phase. As such, the key technologies involved in this study are the Design for Removal Mechanical Capture Interface (MICE) and the 3D-marker navigation support, and for capture and stabilisation, a robotic assembly, end-effector, clamping mechanism, relative navigation, visual serving and the guidance and navigation chain.
The activity is called Capture Bay Design and End-to-End Verification of Design for Removal (CAT) and its ITT can be found here.
This post has been illustrated by Sacha Berna, scientific illustrator.
Discussion: one comment
I’m looking forward to seeing how this design will influence the use of Redwire’s robotic arms and end-effectors