


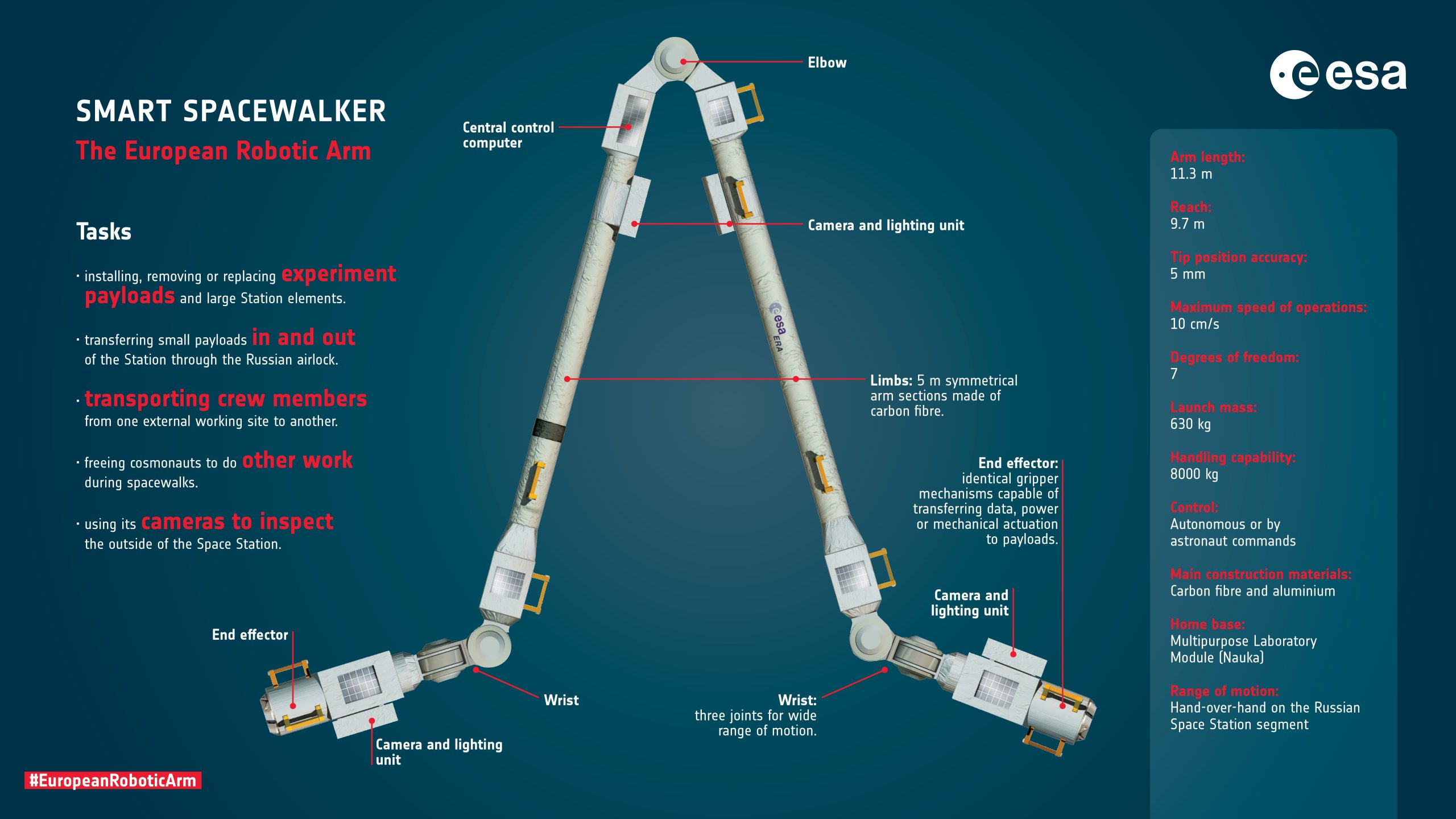
The European Robotic Arm (ERA) is much like a human arm. It has an elbow, shoulders and even wrists able to move up to 8000 kg in the weightlessness of space.
The time was a few minutes past 20:00 in most of Europe, or 18:00 GMT, on 28 April. And there was somebody on Earth who had been waiting for this moment for over two decades.
Philippe Schoonejans, ESA’s project manager for the European Robotic Arm, was elated.
“It is great to finally see ERA moving on the International Space Station. Our robot behaved exactly as in the simulations on ground. Just as we wanted,” he says.
Philippe watched the action from a control room on the Dutch coast, in the ERA Support Centre. The ERA team closely followed the operations at the Erasmus Support Facility in ESTEC, the technical heart of ESA in Noordwijk, the Netherlands.
He wasn’t alone. A small team of ESA colleagues supported the space choreography. “The main objective was to install ERA from launch position to active mode,” explains Fabio Tagliapietra, ERA’s system engineer.

Part of the ERA support team in the Netherlands. From left to right,Liliya Meleshenkova, Lodewijk Aris and Fabio Tagliapietra. Credits: Terma
A new arm for space
The arm was launched to space in July 2021 together with the Multipurpose Laboratory Module, also known as Nauka. All 11 metres of the arm travelled mounted in the ‘Charlie Chaplin’ launch configuration, a nickname given by ERA engineers due to the resemblance of the arm’s layout to the classic comedy actor’s stance.
The robotic arm needed a hand from two spacewalkers who worked outside the Space Station for nearly eight hours. Russian cosmonauts Oleg Artemyev and Denis Matveev first removed some thermal blankets and then unfastened the robotic arm by releasing the launch locks during the 250th spacewalk to upgrade the International Space Station.

ERA deploys on Nauka over Earth background. Credits: ESA–M. Maurer
The Space Station already has two robotic arms – Canadian and Japanese robots play a crucial role in berthing spacecraft and transferring payloads and astronauts.
“Europe’s robotic arm brings new ways of operating automated machines to the orbital complex,” points out Philippe.
ERA is able to perform many tasks automatically or semi-automatically, can be directed either from inside or outside the Station, and it can be controlled in real time or preprogrammed.
The latest space robot can anchor itself to the Station and move back and forward by itself, hand-over-hand between fixed basepoints.

Translation move in space. Credits: ESA–M. Mauer
“After the first stretch, ERA moved itself to another base point in Nauka in what we call a walk-off manoeuvre. The moves were smooth, and the subsystems worked successfully during the entire operation” adds Fabio.
These first successful moves for the European Robotic Arm were preceded by another spacewalk earlier last month. Oleg and Denis began activating the arm on 18 April, when they installed a control panel near the robotic arm’s base point, checked the control system, removed protective covers and installed handrails.
Today the robotic arm will move to its home base and enter hibernation until the next operations.
Next up
Additional spacewalks are planned to continue outfitting and commissioning the European Robotic Arm before real operations begin. ERA’s first tasks in orbit are to set up the airlock and install a radiator for Nauka.
“We are moving forward towards a full validation in June, and the first operational missions already in August,” adds Philippe.
ESA astronaut Samantha Cristoforetti is currently on Station and may take part in future spacewalks for ERA during her Minerva mission. Once ERA is fully operational, astronauts will use the robotic arm to save time and effort during Space Station maintenance.
The European Robotic Arm will act as a tool to transfer small payloads with 5 mm precision directly from inside to outside the International Space Station without the need for spacewalks and will also help spacewalkers by transporting them around like a cherry-picker crane.
In this ESA Explores podcast episode, Dutch astronaut André Kuipers shares how he trained with ERA underwater and talks us through its features from an astronaut’s perspective.
