
In an era where the growing risk of space debris threatens both operational spacecraft and the future of space exploration, ESA’s CAT-IOD mission plays a pivotal role in developing solutions to tackle this challenge. Aligned with ESA’s Zero Debris by 2030 initiative, the CAT-IOD mission is setting the stage for the future of Active Debris Removal (ADR).
This In-Orbit Demonstration (IOD) mission, developed by GMV in collaboration with AVS under ESA’s guidance, aims to validate and advance ADR capabilities, focusing on developing and testing innovative solutions like the Capture Bay for Active Debris Removal (CAT) and the Mechanical Interface for Capture and Extraction (MICE). These technologies are designed to safely and effectively remove non-cooperative, defunct satellites from orbit, marking a crucial step toward cleaner and more sustainable space operations.

CAT robotic assembly
Credits: GMV
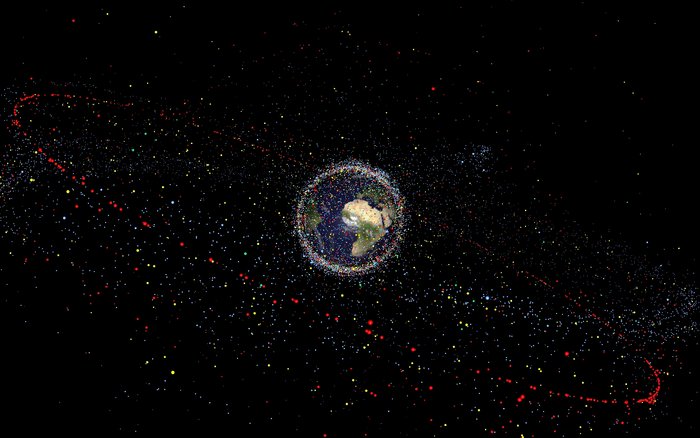
Why CAT-IOD? Addressing the Space Debris Challenge
The ever-increasing number of satellites in orbit poses a significant risk to operational spacecraft and the sustainability of space activities. As more satellites are launched, the potential for collisions and the creation of space debris also rises. CAT-IOD is designed to demonstrate how ADR can become a feasible, scalable solution by testing technologies tailored for telecom-class satellites and beyond.
The mission also aligns with ESA’s drive to ensure that new satellite generations, such as Copernicus expansion missions, integrate Design for Removal (D4R) standards. These standards promote sustainable practices by making satellites ADR-compatible from the start, reducing risks and costs for future debris removal operations.
Mission Objectives
At the heart of the mission is the CAT system, an active mechanical interface that captures passive interfaces. An essential supporting technology for capture and navigation is MICE, a device installed on the client satellite that also aids in navigation by providing visual markers and retroreflectors. The primary goals of the mission are:
- Validate CAT’s Functionality: Demonstrate the performance of CAT in orbit.
- Capture the client satellite interface: Demonstrating how the servicer satellite can dock to the client satellite during final rendezvous.
- Support navigation sensing: Using technologies that enable precise navigation and positioning for close-proximity operations to support safe rendezvous and docking.
- Demonstrate scalability: Proving that CAT can be scaled for future missions involving larger, more complex satellites, including future missions such as the Copernicus Next Generation.
Timeline and Development Roadmap
- 2024: Critical Design Review for CAT and validate CAT subsystems up to TRL 5.
- Q2 2025: Integration and testing of CAT and MICE systems.
- 2026: Achieve TRL 7 for CAT and Guidance, Navigation, and Control (GNC) technologies.
The Mission Phases: A Step-by-Step Approach
The CAT-IOD mission simulates two scenarios: cooperative and non-cooperative rendezvous, reflecting challenges in ADR missions.
- Cooperative Scenario: the client satellite maintains a stable and predictable orientation and aligns its attitude with the chaser to simplify capture operations. The servicer satellite uses D4R features, such as relative navigation markers and mechanical interfaces, to align with the docking interface and perform a controlled capture. This scenario presents how D4R features integrated into satellites simplify ADR operations.
- Non-Cooperative Scenario: represents a more challenging scenario, where the client satellite is inactive and tumbling at up to 1 degree per second. This phase will test CAT’s ability to perform angular rate synchronization and posteriorly establish a secure mechanical connection.
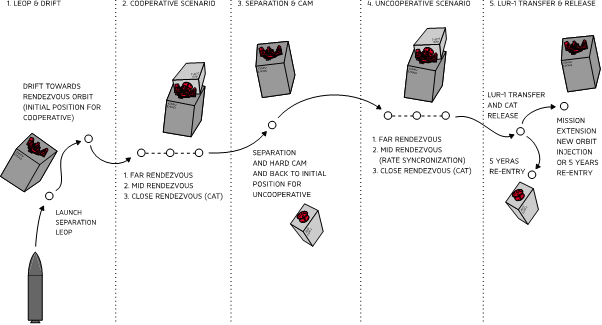
High Level CAT-IOD Mission CONOPS
Credits: GMV
Mission Technologies
The success of CAT-IOD depends on a combination of technologies, each tailored to address the challenges of rendezvous, capture, and disposal:
- Close-Proximity Navigation Aids: These include Admatis 2D markers for mid-distance navigation and retroreflectors to aid far-distance relative navigation by determining spin rate and axis.
- Perception Unit: Equipped with cameras and lighting, this system enables precise navigation and supports capture operations during the final approach.
- Robotic Assembly: The servicer’s robotic arm, fitted with a gripper, to capture the client satellite’s interface.
- Detumbling Systems: Designed to stabilize non-cooperative, tumbling satellites.
- GNC Algorithms: including centroiding for far-distance navigation, model-based tracking for mid-distance navigation, and synchronization for precise alignment during final capture.
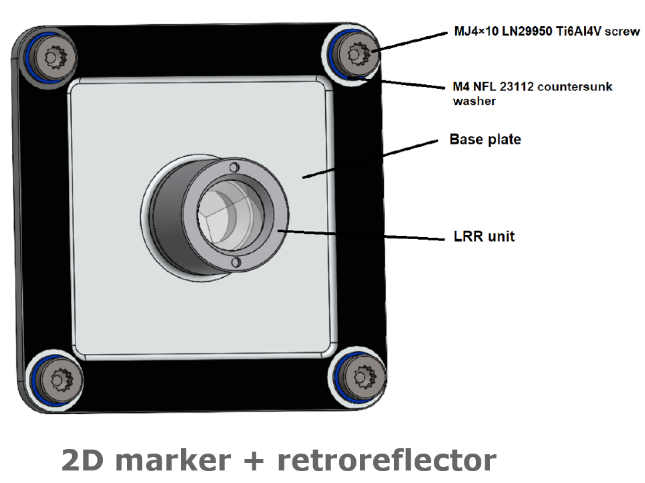
2D marker and retroreflector
Credits: GMV
Close Approach and Capture Operations
The success of the mission lies in the close-proximity and capture phases, where precision and coordination are utmost to achieve zero relative motion between the servicer and client. These operations involve:
- Synchronization: Aligning CAT with the passive interface using translational and rotational guidance.
- Wait Phase: Maintaining alignment while rotating with the client satellite to ensure steady-state conditions.
- Approach Phase: Controlled motion toward the target for achieving the final.
The client satellite for CAT-IOD will be LUR-1, which supports these phases by D4R-enabled features, including retroreflectors for spin rate and axis determination, Admatis 2D markers for far and mid-distance navigation, and a passive interface optimized for capture without additional clamping mechanisms to reduce cost and complexity. Moreover, while CAT-IOD leverages the principles of ESA’s D4R framework, it must be noted that certain modifications have been made to accommodate LUR-1:
- Reducing the number of retroreflectors and markers without compromising navigation accuracy.
- Adjusting CAT’s perception unit to ensure compatibility with smaller platforms.
Toward Scalable Solutions
The representativeness of CAT-IOD in future large-scale missions, such as Copernicus Next Generation, stresses its importance. The mission’s findings will inform the design of:
- Advanced navigation aids for autonomous operations.
- Lightweight yet robust capture interfaces.
- Scalable solutions for high-mass satellites.
Conclusion: Bridging Technology and Sustainability
The CAT-IOD mission is more than a technological demonstration; it is a critical step toward a cleaner and more sustainable space environment. It highlights ESA’s commitment to tackling the growing number of orbital debris by validating ADR technologies in orbit, and sets a new standard for sustainable space operations, bridging the gap between today’s challenges and tomorrow’s scalable solutions.
With CAT-IOD as a proof of concept, the path to achieving Zero Debris by 2030 becomes clearer, ensuring that future generations can explore space responsibly and sustainably.
RELATED CONTENT
- Follow our Clean Space LinkedIn Page
- Learn more about the Zero Debris (ZD) approach
- Find out more about the Design for Removal (D4R) workshop: paving the way for standardized de-orbiting solutions – The Clean Space blog
- Watch the Webinar | Standardised De-orbit Interface Definition for Satcom-class Spacecraft
Discussion: no comments