
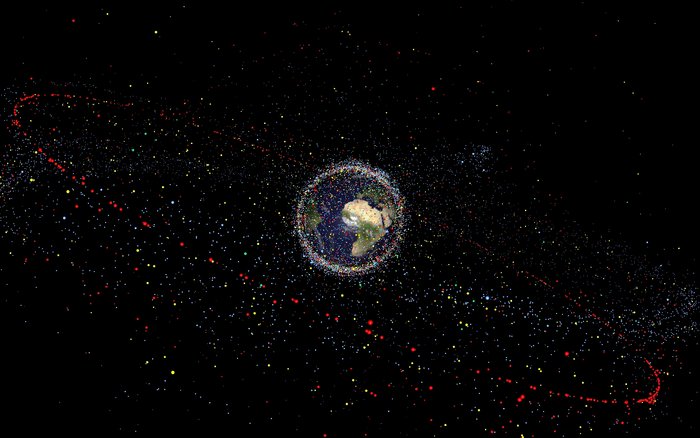
There is always a chance that any single satellite will go wrong, and as more are launched – in this dawning age of megaconstellations – the more will fail. In lower orbits this would not pose too much of a problem, since they would probably reenter within the 25 year time limit.
But up in higher orbits, the failure of a certain proportion of megaconstellations might pose a real problem – and there are many more megaconstellation launches on the way. Might a harpoon help solve this growing issue of debris in orbit?
In recent years ESA has been researching the concept of a debris-catching harpoon with European space actors. Its latest activity has covered a fundamental aspect of the concept: the interaction between the harpoon and the target.
This activity, conducted by Airbus UK as prime contractor together with Cavendish Laboratory, the University of New South Wales and Brunel University gave some promising results.
The objective was to develop the harpoon concept and to investigate its interaction with its target. This has required the development of models and simulations as well as practical experiments.
The contractors also had to develop a functional breadboard system including the design of a test campaign to validate its performance. Finally they had to derive requirements on future deorbiting missions and identify suitable mission scenarios and targets.
The primary focus is Envisat, a large defunct and tumbling satellite. Envisat was selected for the activity not only because it is the largest debris risk of any European satellite, but also because it has large panels suitable for harpoon capture.
The mission concept proposed encompasses a chaser that would:
1. embark three deployers and three harpoons
2. rendezvous with the target debris and observe it to gather data about its rotation rates and any potential damage
3. keep a safe distance of 20-30 metres to shoot its first harpoon
4. apply a force through its tether to detumble the target
5. drag the target to a chosen reentry point and release it to reenter the atmosphere and land in the South Pacific Ocean Uninhabited Area, the designated ‘spacecraft graveyard’
6. rendezvous with a second target to perform a second debris removal mission.
The advantage of this concept is that the chaser could perform up to three debris removal missions and in case the harpoon did not reach its target on the first try, then a second harpoon can still be deployed. Most likely two missions will be performed, depending on the fuel budget on the chaser.
There will be radar detection tips on the harpoon to ensure that it could be tracked from the ground. This could become necessary if the harpoon missed its target and would need releasing.
The contractor proposed to design the projectile in a pointed ‘ogive’ form with a lead tip. They demonstrated that this design performed optimally during impact.
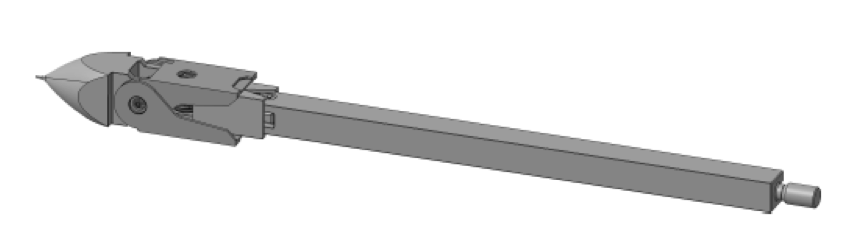
Projectile Design – tips and barbs
Projectile Design with opened barbs
[youtube https://www.youtube.com/watch?v=7ySfhMxru0g]
Go deeper with some common questions about the harpoon and their answers:
How do you apply forces through the tether to detumble the target?
When the harpoon has reached its target, then you have some left over tether. Therefore, you start your own AOCS (attitude and orbit control system) to stabilise, and pull constantly in one direction. This should help with detumbling the satellite. So basically you detumble over time using the thrust of your chaser. Obviously the thrust needs to be modulated according to the attitude of your target.
How do you ensure that when dragging your target to the reentry point, the target will not collide into your chaser?
This is not a risk because you have a constant pull. It could become a risk only if you would stop accelerating the chaser.
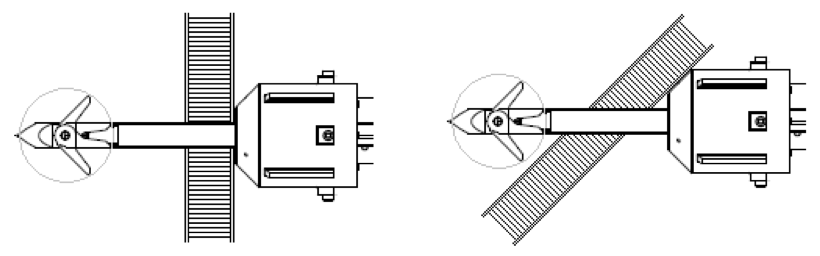
We might expect the creation of debris during the prying. Should we be worried about this?
As the debris will stay inside the target during prying there is no reason to worry about the creation of debris. In the worst case, some particles might be released in space.

Harpoon prying its target
Lots of people, including space engineers, are wondering if it makes really sense to use a harpoon in space as it shares the main challenges of both the robotic arm and the net concepts.
Martin Zwick, robotics system engineer at ESA, disagrees with these statements as “the harpoon can grab a target easily. The technology has no collision risk during the capture, in particular as you are far from the target and also more importantly, the harpoon has the ability to detumble its satellite! On top of this, the harpoon can be use for any type of spacecraft. It is a versatile technology.”
The tests performed on ground showed a good accuracy of the harpoon system:
– with a 90% chance of hitting the target at 90° impact angle
– a 83% chance to hit it at 45°
In conclusion, this study demonstrated the viability of a harpoon to catch debris in space.
Related content
– Space debris: catch it if we can
– From active debris removal to in-orbit servicing: the new trajectory of e.Deorbit
Discussion: 2 comments
Harpoons must be considered a method of last resort for retrieving large objects from space. While it is certainly worthwhile to leave minor bits of debris when removing a large object, the harpoon-tether system risks fragmentation of the object’s deployed structures during the intercept by glancing blows that hit structural elements at the wrong angle or drag the tether across solar arrays or antennas during de-tumbling.
In addition, any tether-based system risks the recovery spacecraft getting entangled with a rotating object during recovery of an object with sufficient angular momentum. Better to equip the harpoon or net with an ADCS and thrusters and stand off safely as the target is stabilized for RPO.
Really appreciate you taking the time to educate us on this. I would have never thought of some of these secrets, but it makes perfect sense.