
Some of them are as large as cars or even buses, they tumble uncontrollably, and they move faster than a speeding bullet, so how do you catch one?
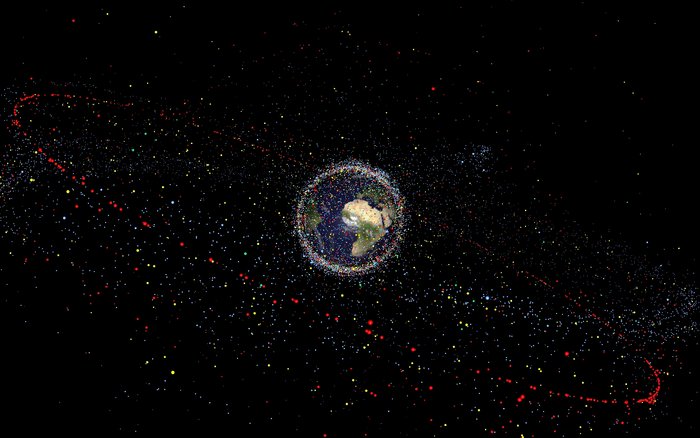
“They” are space debris, and you have to remove one, because if you don’t it will eventually hit something else, and that large, speeding, tumbling bus, becomes thousands of smaller pieces that will again hit other items in an ongoing cascade.
Such a cascading expansion of the population of orbital debris was predicted by NASA’s Donald Kessler 30 years ago, and was the inspiration for the movie Gravity (2013). That movie is clearly a dramatisation, but the problem is real. Today’s mission controllers need to do more and more collision avoidance manoeuvres, which are increasing the cost of spaceflight. Experts have warned us that the only way to halt Kessler’s syndrome is to remove particularly vulnerable items from the busiest orbits.
But how can such debris removal be carried out?
ESA and its industrial partners have been taking inspiration both from technology as old as human civilization itself – nets, spears and harpoons – together with space-age, cutting edge robotics. There are many ways to skin a cat as they say, and the various methods being considered all have their advantages and complications.
Nets were popular among roman gladiators for their ability to incapacitate your opponent once he was entangled. A net contacts the target at many different points, catching on any little angles or protrusions, and any further movement just causes further entanglement. The same would be true of satellites; they have many small projections and angles on which the net catches and entangles, with the load being more or less evenly distributed so that it does not become too high at any particular location.
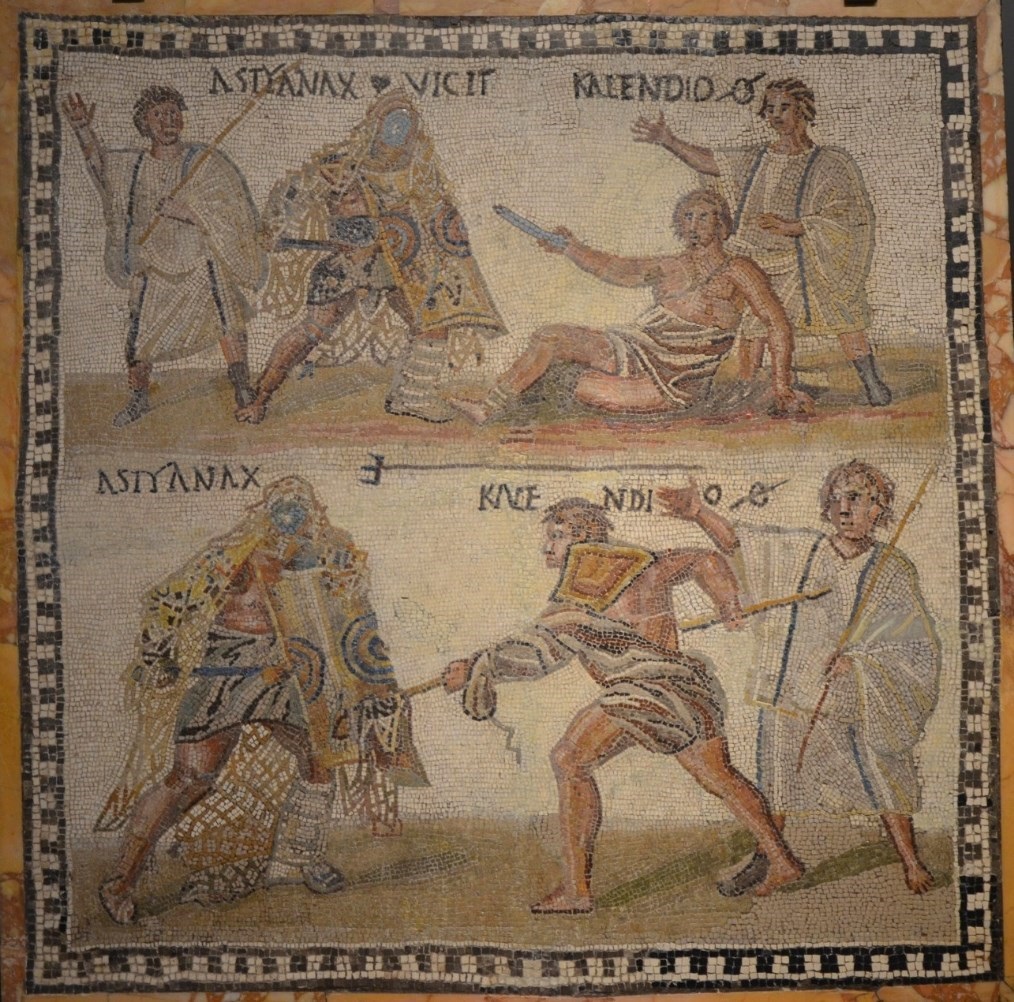
By Carole Raddato from FRANKFURT, Germany [CC BY-SA 2.0 (https://creativecommons.org/licenses/by-sa/2.0)], via Wikimedia Commons
Then, once you catch the satellite, you will have to take it out of orbit, which most probably means crashing it into the ocean somewhere far, far from people. With a net caught around it you would do that by pulling it on a tether, thereby slowing it down enough that it falls out of the sky precisely where required. That part is challenging. The advantage of course, is that you do not need to get too close to throw the net at it.
Another technology that is as old as the net, and also under study, is the harpoon. Like its cousin used in whaling, it penetrates the target then deploys barbs that will carry the load when it is pulled on. As with the net the capture spacecraft does not have to get too close, and as with the net it would then pull at the satellite through a tether to slow it down afterwards.
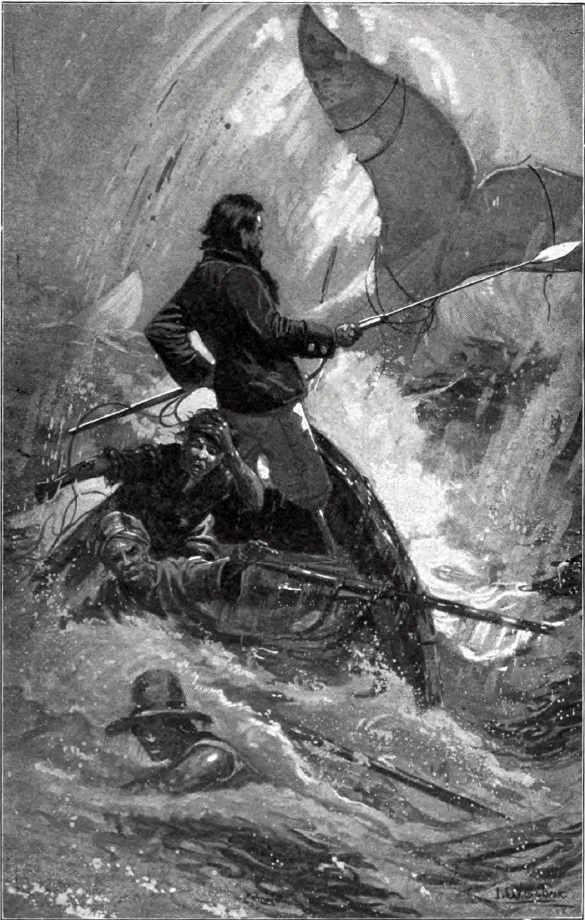
By I. W. Taber [Public domain], via Wikimedia Commons
But it’s not true to say that ESA is stuck in technologies pre-dating the Dark Ages. We are looking into achieving debris capture with robotics too. A sufficiently-agile robot could attach itself to the target satellite. The main difficulty here is getting close enough. To attach ourselves would mean coming within metres of our bus-sized, tumbling piece of metal, travelling faster than a speeding bullet. However, if all goes well, the robot would travel at exactly the same speed, so the relative speed should be low. But with the satellite tumbling the challenge remains high. It goes without saying that the robot has to be very precise and fast to ensure the target debris is properly grappled before the physics of free-floating dynamics makes the robot and the debris move apart again.
Once the robot is attached however, it could turn the target around and use its boosters to slow it down to precisely the right level so that the space debris (and the robot) fall out of the sky at exactly the right location. We actually know how to do that, so it’s a bit less scary, which is why it is currently the baseline for ESA’s e.Deorbit mission.
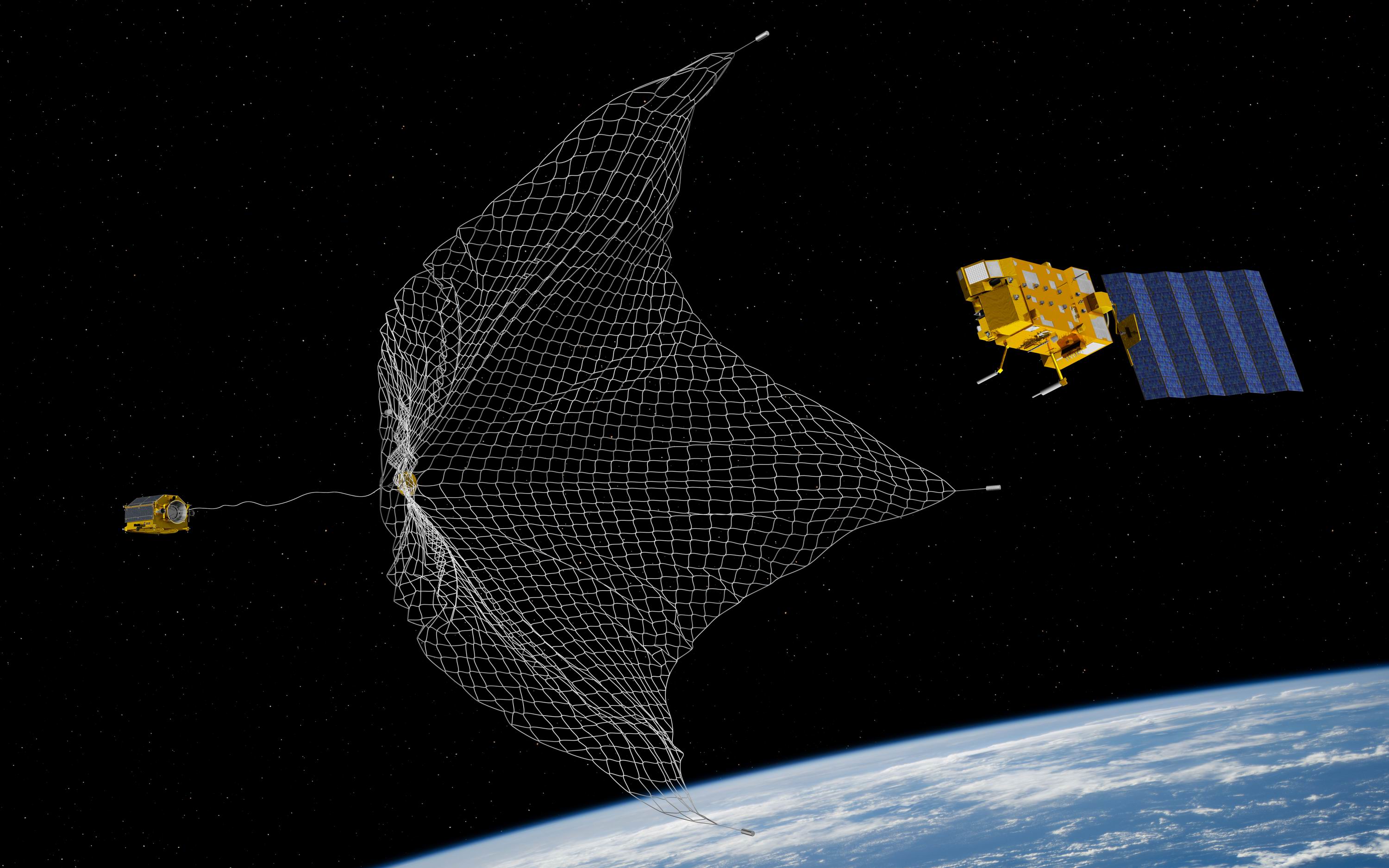
e.Deorbit; capture a derelict satellite
Copyrights: ESA–David Ducros, 2016
So some technologies make it less scary before capture, some after. ESA is developing e.Deorbit, and we will have to choose one of the options. However, to keep low Earth orbit usable for future space-activities, we need to start removing several large pieces of debris every year. That will have to be done by industry participating in a new global debris-removal business. We are not there yet, but once we are, ESA will have shown that there are indeed several knives that can be used to skin this particular spacecat; both ancient and new.
This post has been written by Kjetil Wormnes, who has worked for 5 years at ESA as Mechatronics Engineer. He has been in charge of robotics for the e.Deorbit mission and been leading most of ESAs technology developments to mature the different technologies for capturing space debris.
- Read more about the e.Deorbit mission
- Follow the clean space team on Twitter
- Get amazed by the e.Deorbit mission (video)
Discussion: 2 comments
I know this is an old topic and this has probably technical limitiations but is it possible to send up a satellite that has a sponge (or some other material that can soak in pieces of debris) at one end then put itself into position to catch debris that is flying around the planet before finally reducing its orbit to burn up in the atmosphere?
Why keep trying to catch stuff thats moving at 17k per hour when it’s coming your way anyway?
Carbon fiber netting with attached engines/thrusters on ends to position the net to catch passing debris which can be brought into the atnmosphere to burn or sent into the sun would be a ideal way to diminsih space junk.