
For the final interview of the series, we interview Alexander Cropp, part of ESA’s Guidance, Navigation and Control Section, recently joining the group working on e.Deorbit, taking over from Jesus Gil, who also actively supported the group from the mission’s start. Both were guiding ESA in ensuring the development of a robust, super-efficient and reliable GNC system for the mission.
When Alexander started working on e.Deorbit, the question was still open whether a tether, a robotic arm or another technology would be used to capture the target.
While ESA and the e.Deorbit consortium finally judged the robotic arm as the best solution, Alexander has gone on pondering how other technologies such as the tether might be used for an active debris removal mission in future.
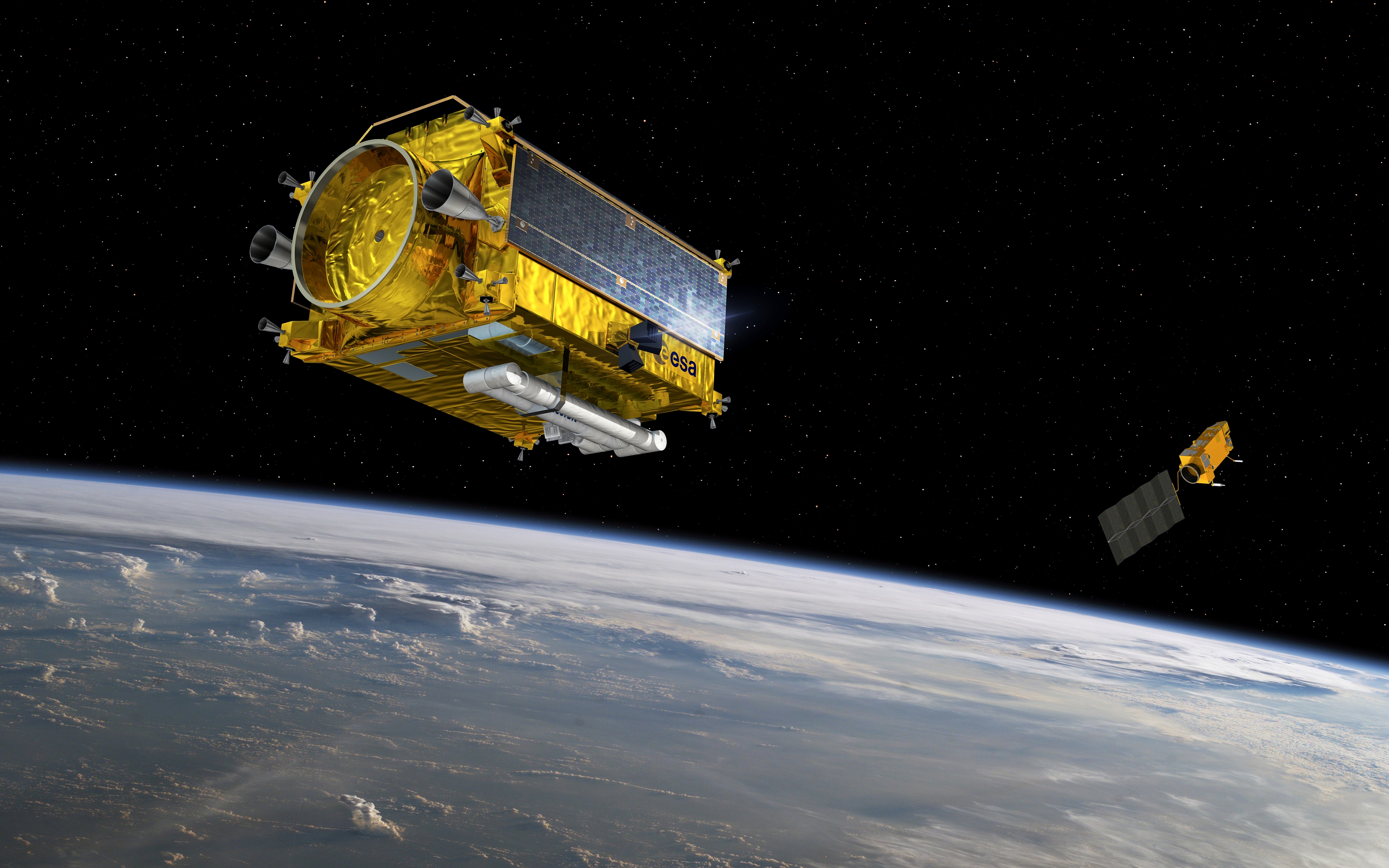
Synchronise the guidance, navigation and control (GNC) systems with the robot arm is critical to safely capture a target.
The robotic arm is what might be called a recurrent technology: usable for a variety of different functions such as refuelling, reorbiting, repairing. At the moment ESA is managing a study to look at combining the control of the satellite and the control of the arm in one go. “Originally this was not the case,” explains Alexander. “It was foreseen that the robot arm control software would be different from the satellite control software. They are located in different places and they don’t necessary talk to each other. So it was envisaged that the satellite would move close to the target and then the satellite would cut off and the robot arm would take over and try to grab the target. Then the robot arm as it moves would try to synchronise with the target. However, it is important to understand that if you suddenly cut the GNC then the satellite immediately starts to drift away.”
This is why studies such as COMRAD are now looking at combining the robotic arm and the GNC. “This study will be incredibly beneficial for the upcoming in-orbit servicing missions,” adds Alexander. “Of course if the target satellite is not spinning then capture would prove much easier as then we may not need synchronisation with it by the chaser satellite.”
However, being able to cope with a tumbling target will enable coping with a satellite in any state. As Envisat is a big tumbling target, such a scenario had to be studied. The results will now be used for the in-orbit servicing missions. “The companies working on the RFI are now in a better and much easier situation today thanks to the studies made for e.Deorbit,” affirms Alexander.
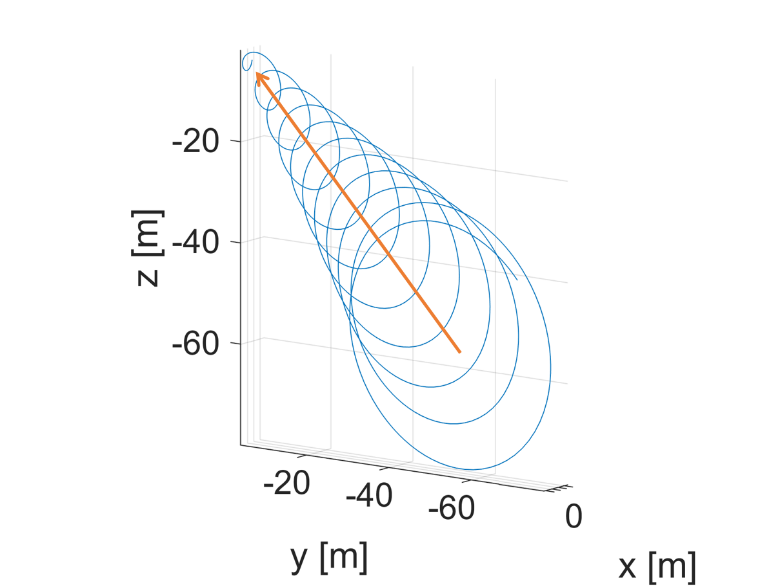
Relative motion in inertial frame. Showing the final approach along a straight line in inertial frame. The orange line approximates direction and mean motion of the approach for clarification.
On top of this: “we are today in the position to have a reliable estimate of how a satellite will tumble back during its design phase, based on ground measurements.”
Indeed ESA is developing new algorithms and sensors to be able to estimate the orientation and position of the chaser relative to the target satellite. “These new technologies are fundamental to achieve successful capture in the presence of an uncooperative, tumbling object. It is similar to trying to land a small helicopter, at night, on a Ferris wheel that rotates around an unknown axis,” explains Jesus Gil.
Tumbling has an impact on how agile your chaser satellite will need to be and on the level of force the robotic arm or the tether would need. Tumbling estimates help identify which technology should be favoured for servicing, and the robustness it needs. This is definitely a huge advancement for the design of any satellite, and not only for an active debris removal mission or another type of servicing mission.
Alexander highlights the fact that “e.Deorbit would be a very difficult mission because trying to pull down Envisat represents a great challenge.” He adds that he does “not see any fundamental reasons why this could not be done as there are no fundamental technical issues involved.” But due to itssize and complexity, such a project requires a huge financial investment and that is difficult to find. “e.Deorbit is the kind of mission where if we don’t do it, and if something happens, then it will be clear that we should have done it.”
Read previous posts of the series ‘From ADR to IOS’:
Discussion: no comments