
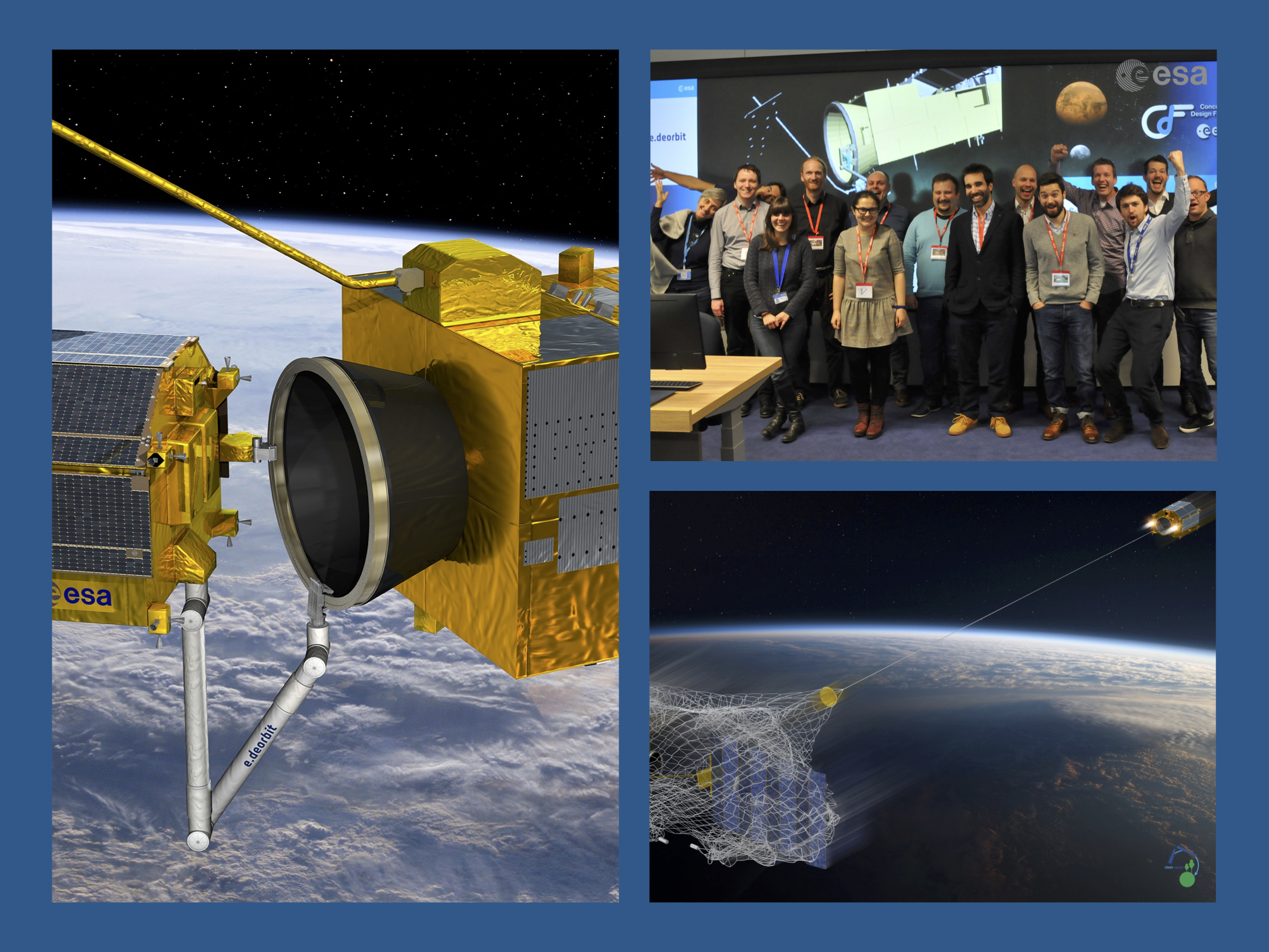
As part of ESA’s e.Deorbit team, Sarmad Aziz has been working on ways to catch and stabilise a tumbling satellite. As with Luisa and Robin and Andrew, he explains the lessons learned in the process – this time from the vantage point of a robotics expert.
The main take-away from all the studies performed on active debris removal?
“Simply that it is very difficult to do,” Sarmad explains, “and very challenging and demanding for all key systems and subsystems. None of them could do it alone – they all need to work smoothly and reliably together. So while you need to interact with experts of all domains when making any space mission, in the case of an active debris removal mission it goes further: the experts must work together all the time. Certainly for e.Deorbit the level of coordination and synchronisation between guidance, navigation and control and robotics was higher than anything in the past. Even for very small changes, discussion and interaction was always essential.”
ESA did some work on the harpoon-based capture concept, and is still running an activity on this technology, but it doesn’t offer enough advantages over a net or robotic arm. In order to hit accurately excellent GNC will still be required. In addition, the harpoon still needs a flexible tether, as with a net.
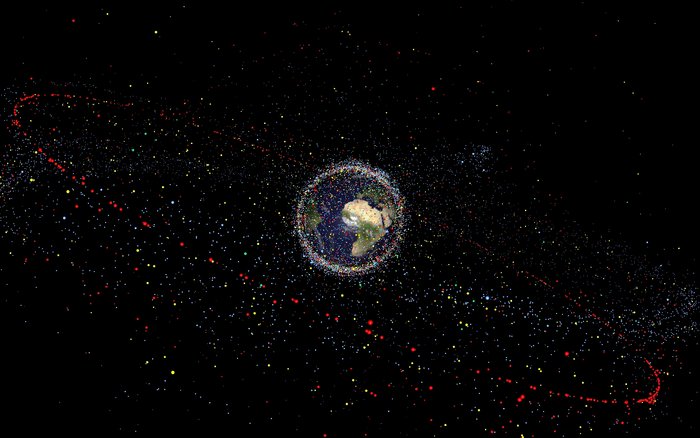
Any tether-based capturing procedure comes with a problem: it is very difficult to control the pulling of the target. If it is pulled too hard, then the object might end up hitting the chaser, making a new collision and spawning further debris. So the harpoon needs the same complex GNC as a robotic arm and shares the same tether-based drawbacks as the net, without giving any clear advantage of its own. ESA has carried out in-depth studies of the net and the robotic arm.
[youtube https://www.youtube.com/watch?v=mx9Fb5sixBU]
Most of the work done to find the best robotics for e.Deorbit will be reused for active debris removal, Sarmad argues: “The boundary case is e.Deorbit. If we can do active debris removal, we can certainly perform servicing, but the reverse is not true. Servicing is less demanding on GNC and robotics because the target is cooperative, compared to the tumbling eight-tonne target that e.Deorbit was aiming for. With the RFI we may target an easier target than the challenging Envisat.
“ESA will support European industry in the development of competitive in-orbit servicing missions, aimed at being the global leader in this domain, pushing a service approach to reduce costs. It is unfortunate there is no e.Deorbit mission to come, but the work done for e.Deorbit has enabled industry to put forward some good proposals for the RFI. Now we’re looking forward to the first flight of an in-orbit servicing mission, and let’s hope it will be to take down an item of debris.”
Read other posts of the series ‘From ADR to IOS’:
Discussion: 3 comments
Sir is the launching system of this system is costly
Hi, I’ve really enjoyed this blog so far. Unfortunately I am unable to access part 4 as the website is asking me to login for permission. Is there an alternate way I can access part 4?
Dear Marcus,
there was an issue with the link. You may now access it: https://blogs.esa.int/cleanspace/2019/02/01/from-adr-to-ios-the-legacy-of-e-deorbit-part-four/
Have a nice day