
A safe and secure space environment is a requirement for all current and future space activities. Analyses performed by ESA and NASA indicate that the only means of sustaining the orbital environment at a safe level for space operations in future will be by carrying out both active debris removal and end-of-life de-orbiting or re-orbiting of future space assets. ESA, through its Clean Space (CS) initiative, is devoting an increasing amount of attention to the environmental impact of its activities.
To contribute to space sustainability, some agencies and governments have established or adopted policies to mitigate space debris creation. For instance, the ESA Policy on Space Debris states that satellites must remove themselves from the protected regions, less than 25 years for LEO and less than two months for GEO after operations are complete.
Nevertheless, even if spacecraft are designed to achieve an End-of-Life (EOL) compliance with these Space Debris Mitigation (SDM) requirements, a failure of the spacecraft, or other unforeseen events, may lead to the satellite becoming non-operational in the protected regions (this is even reflected in the SDM requirement, which calls for a reliability of 90%). Therefore, such a failed satellite may require active debris removal (ADR).
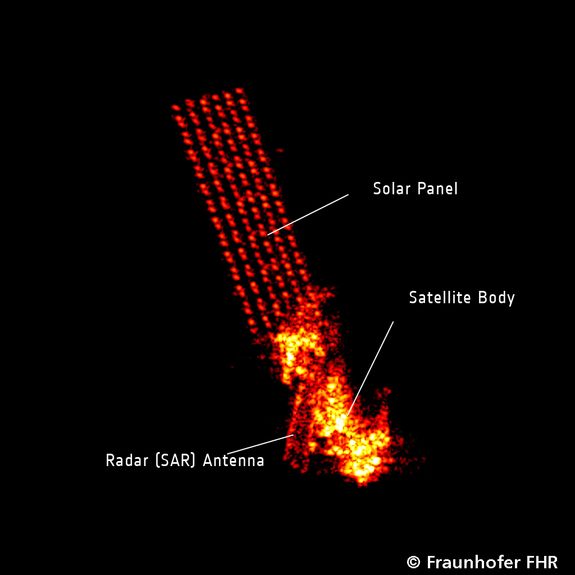
An Image of Envisat taken from a ground based radar, TIRA
Active debris removal has a number of technical challenges and risks in terms of rendezvous and capture of the non-operational satellite, such as:
- Accurately tracking and performing rendezvous
- Achieving the desired attitude for capture considering the target tumbling motion
- Performing the physical capture.
“The retrieval of a space system and return to Earth by means of an external chaser vehicle (Active Debris Removal) is an option that currently cannot be considered yet as a feasible baseline solution for all spacecraft and launch vehicle orbital stages due to high operational costs and low technology readiness.”
The statement above summarises the objective of our Design for Removal (D4R) activity. Its aim is to increase the feasibility of an ADR mission (both in terms of cost and technically) by identifying concepts that could be hosted aboard a spacecraft to facilitate such future ADR mission, if the spacecraft fails to perform its nominal disposal maneuvers.
In terms of D4R, passive stabilisation methods installed on-board the target satellite could limit the rotational rate of the satellite at end-of-life, in turn simplifying and de-risking an ADR mission to remove the satellite. This activity shall focus on characterising the feasibility of magnetic damping solutions for spacecraft through passive stabilisation.
Approaching cooperative targets is difficult enough, but uncooperative, including non- functional, ones, represent a greater challenge still. During an ADR mission, relative navigation will be used to approach the uncooperative target through navigation sensors such as a far range camera (visual), close range camera (visual or multi-spectral) and/or LIDAR. The output of the relative navigation sensors will be inputs for the controllers, but if the attitude of the target consists of a high spin rate, requirements on the controllers / actuators and FDIR to match the desired attitude of the ADR vehicle with the non-operational satellite is demanding.
Retroreflectors
A previous GSP study called ESA Express Procurement EXPRO – Design for Removal identified the different methods to de-risk an active debris removal mission. The activity identified four different areas for technology improvement:
- Stabilisation (e.g. magnetic damping): This segment deals with the stabilization of the debris, depending on the dynamics of the debris AND if the capture or deorbiting mechanism requires such stabilization. Stabilization is meant as the reduction of the uncontrolled rotational/tumbling status of the debris down to a level manageable for Active Debris Removal or On-Orbit Servicing operations.
- Rendezvous aids: This segment is related to the phase of the mission where a chaser spacecraft gets in proximity to a target spacecraft, which in the frame of D4R should be considered non-operational, using relative state measurements.
- Tracking from ground: This segment is related to gathering all the information from ground and/or from orbit about the orbital status of defunct satellites, including its kinematic state.
- Capture interfaces: The capture is related to achieving a link (either rigid or flexible) between the chaser and the debris, in order to, then, attain debris disposal or servicing operations.
Clean Space will use the output of technology development activities to guide the design of future satellites to implement D4R technologies and as starting point for future design for servicing (D4S) activities (in the frame of on-orbit servicing studies), in order to obtain a cheaper way to clean and manage Earth’s orbital environment in future.
Discussion: 2 comments
thanks jessica for sharing
great
Hello dear director of the site and my colleagues
Congratulations on your useful and useful content
thank you