
The idea of a Space Servicing Vehicle (SSV) or space tug concept has been around for many years. The European Space Agency has carried out several studies, many with industry and national agencies, to investigate the potential applications / use cases of such systems. For a variety of reasons, these systems have failed so far to come to fruition, but one of the greatest challenges was the level of maturity of the technologies required, casting doubt on the economic viability and clear industrial need.
The landscape has changed rapidly over the last two years, with industry announcing plans to launch space servicing vehicles to provide various services on-orbit.
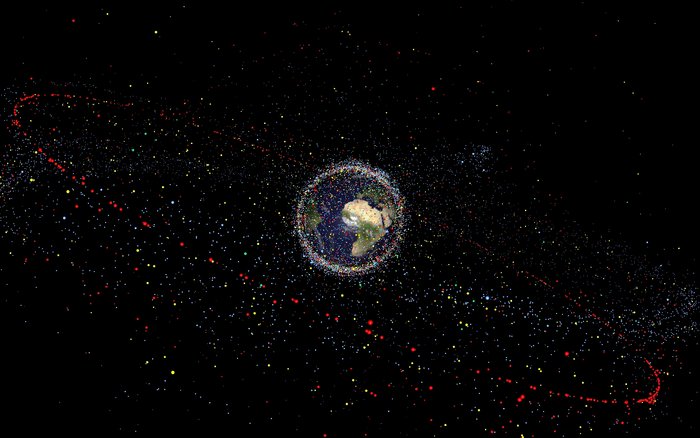
These services cover life extension (e.g. refuelling), assembly-in-orbit, inspection of other satellites and the removal of debris.
All of these mission concepts require that the space servicing vehicles perform close proximity operations, including rendezvous and capture. There are clear synergies in the technologies required for these applications.
ESA is continuing its work on e.Deorbit (a mission to deorbit a non-operational satellite) both at system level with a consolidation phase and at technical level.
Workshops between ESA and industry were held in 2016 and 2017, all highlighting the technical synergies between e.Deorbit and the industrial Space Servicing Vehicle missions.
In January and February of this year, a study involving European industry and several ESA programme representatives looked into the technical understanding of these synergies in depth and to highlight the other technology developments required for different use cases of the space servicing vehicle (e.g. orbit transfer, assembly, refuelling).
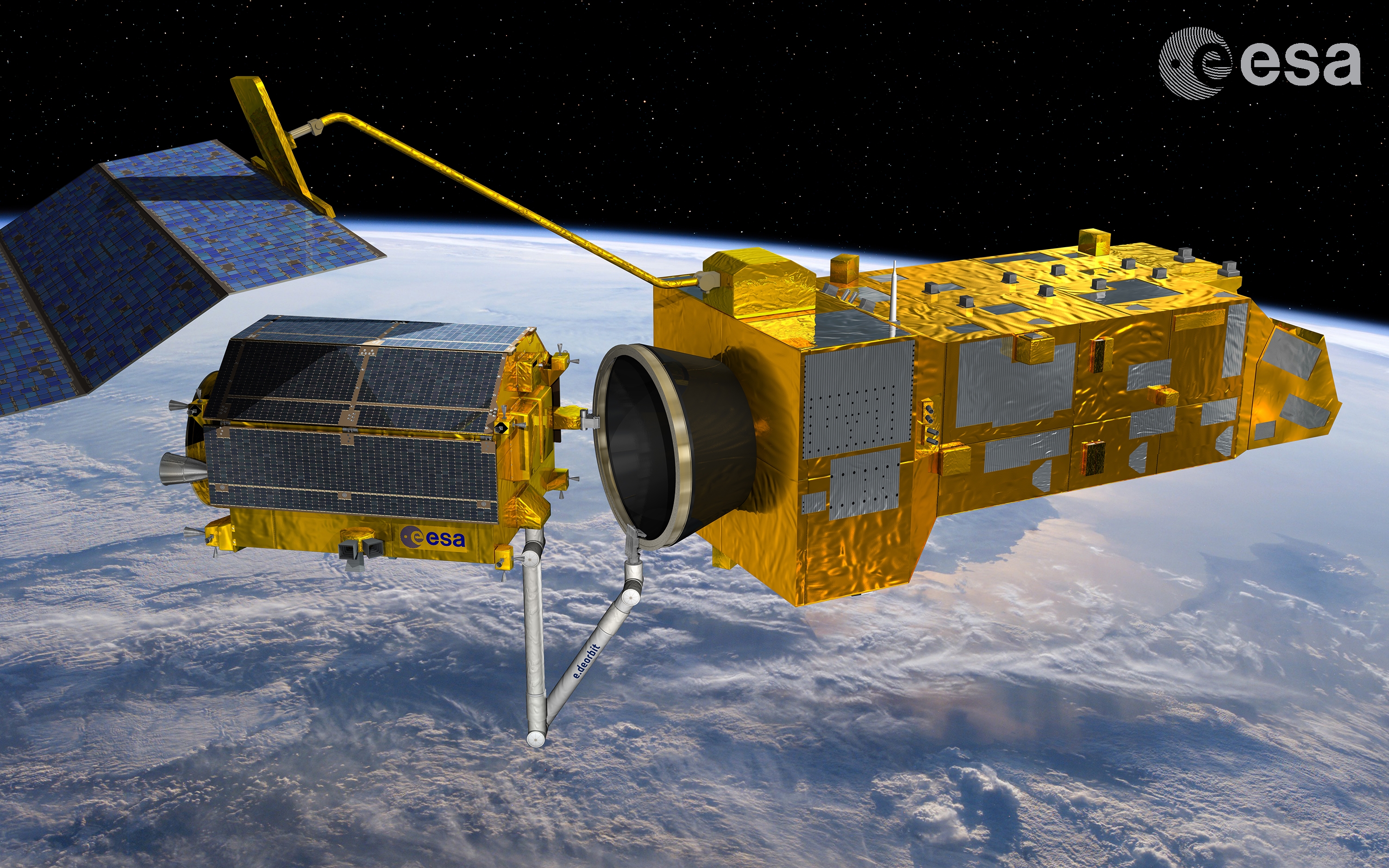
e.Deorbit clamping the target
Copyright: ESA-David Ducros
A total of 33 possible use cases of the SSV were identified and prioritised by ESA and industry.
Four SSV mission scenarios were analysed:
- Payload Module Transfer to the Deep Space Gateway
- GEO Spacecraft Antenna Assembly
- Megaconstellation Active Debris Removal
- Removal of a large space debris object (e.Deorbit mission)
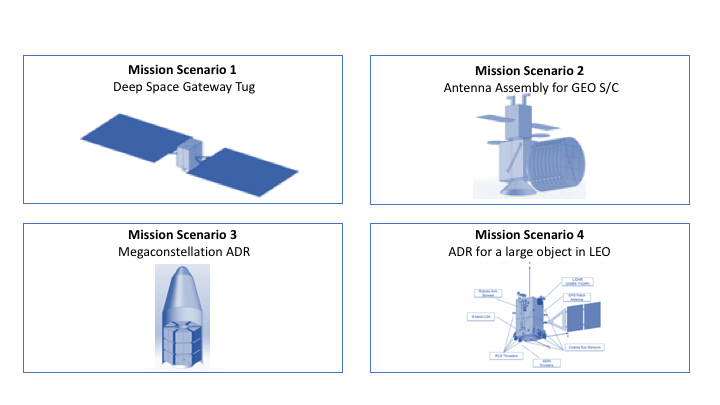
Mission Scenarii of Space Servicing Vehicle
The optimal mission scenario is very different for each of the use cases. Nevertheless synergies exist in a number of areas, notably in the:
- GNC equipment selection, navigation chain, image processing, controllers and approach trajectories
- Robotics at controller (e.g. visual servoing) and equipment level, with both the GEO Servicing mission and the Megaconstellation ADR mission demonstrating a high level of synergy with the e.Deorbit mission
- Operational approach to the safety and support during the approach manoeuvres.
To understand the exact overlap for the different mission scenarios, ESA is currently running the e.Deorbit Consolidation Phase. A bridging Phase between Phase B1 and Phase B2, where industry is analysing the applicability of how a dedicated space servicing vehicle to the removal of Envisat could additionally be used to perform other applications / use cases such as refuelling or inspection of other satellites.
With the ability to reuse key systems/products, a first mission is critical for the development, calibration and demonstration of these functions and technologies. This first mission will act as a pioneer, paving the way for all future Space Servicing Vehicles.
For more information please visit:
Discussion: no comments