
ESA is using the Model-Based System Engineering concept to design the e.Deorbit mission since its Phase A. Applying this approach to an entire space mission is a true challenge and was a first. The successful outcome of this attempt, that is described in this post, is opening the doors to a broader application to the design of future space missions.
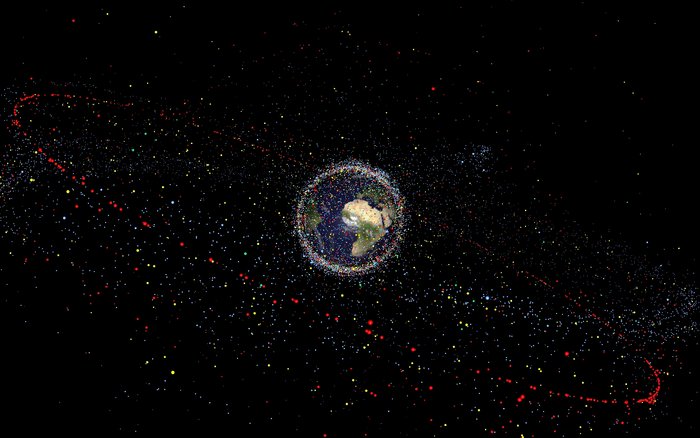
The mission goal of e.Deorbit is to remove a large ESA-owned space debris from Sun-Synchronous Orbit in-between 600 and 800 km altitude. It is a complex mission driven by requirements from robotics, guidance, navigation and control. As from 2012, the ESA’s Concurrent Design Facility (CDF) started studying the mission leading to the decision to apply an MBSE approach, throughout the project. The first model implemented was during the Pre-Phase A, for modelling the physical architecture. The model was based on ESA CDF’s Integrated Design Model (IDM), which has since been replaced by ESA’s Open Concurrent Design Tool (OCDT). OCDT is currently used within ESA, for modelling the physical architecture of all missions studied in the CDF at pre-Phase A level.
Following the e.Deorbit internal feasibility study, three industrial Phase A contracts were awarded by ESA to each of the European Large System Integrators (LSIs), namely Airbus Defense and Space (ADS), OHB and Thales Alenia Space (TAS). As part of the Phase A the contractors were requested to use MBSE for modelling both the physical and functional architectures. Following the successful completion of the Preliminary Requirements Review (PRR), it was recommended to extend the use of MBSE also to system level.
The Phase B1 kicked-off at the end of 2015 by means of two contracts, one led by Airbus, and another parallel competitive contract led by OHB. The contractors were encouraged by ESA to apply MBSE wherever possible.
Each contractor decided to adopt different MBSE tools and methodologies but with the common purpose to:
- Analyse the problem and define its boundaries,
- Derive and manage the requirements,
- Identify the capabilities/functions required by the system,
- Develop the functional, logical and physical architecture,
- Track the verification/validation methods required,
- Start simulations directly from the MBSE model,
- Establish a system level ‘single truth’ data exchange.
This level of application of MBSE represents a significant increase in the usage of such methodologies with respect to previous ESA missions. The e.Deorbit Phase B1 was completed at the beginning of 2017 by an intermediate-Systems Requirement Review (iSRR). This review provided an opportunity to reflect on the advantages of MBSE, and potentially will support ESA’s decision to extensively apply MBSE to the design and development of future missions.
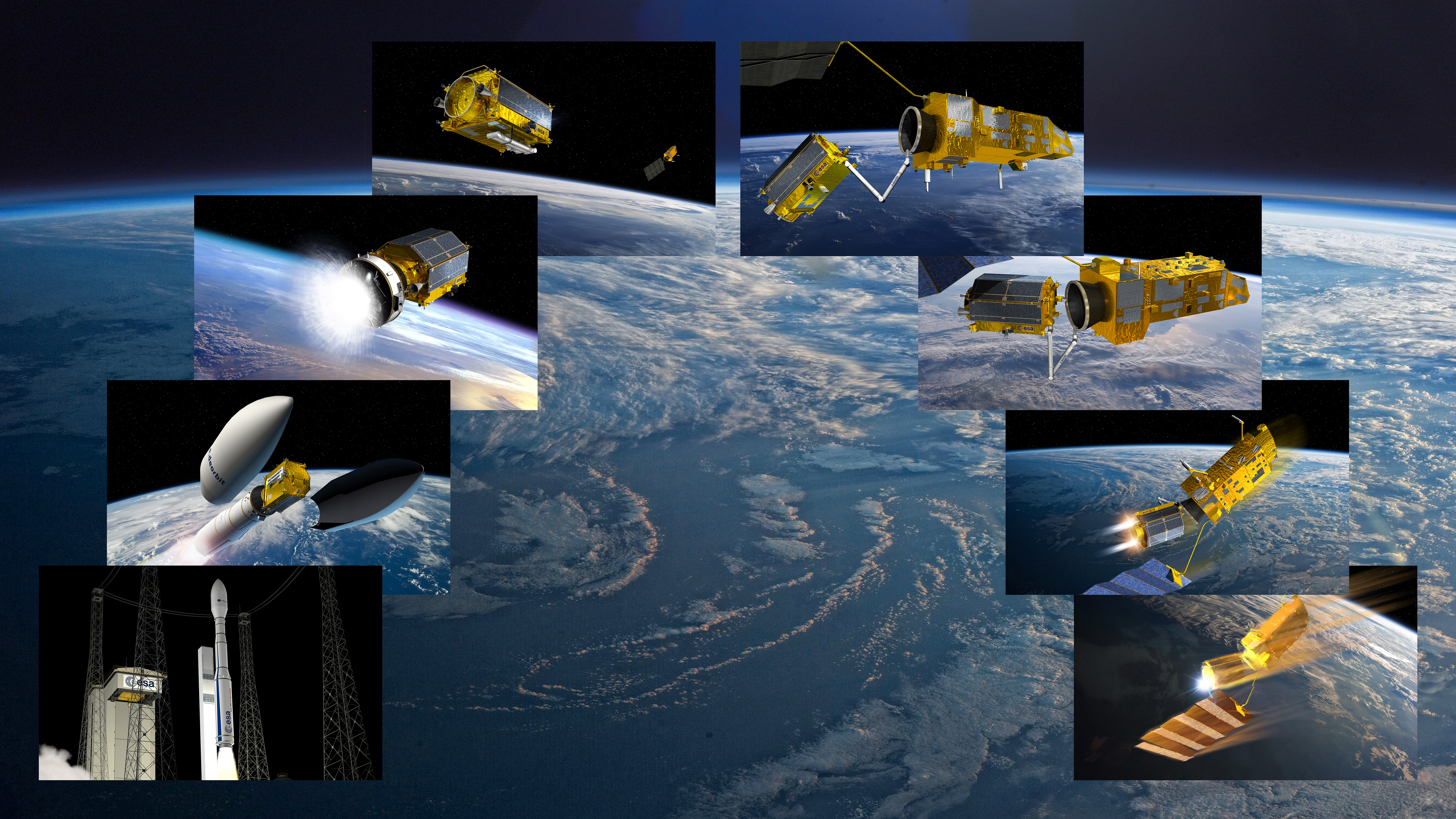
e.Deorbit will be the first-ever active debris removal mission
Credits: ESA–David Ducros, Jacky Huart, 2016
It has been challenging to use the MBSE model to design the e.Deorbit mission. However, the reward is way more important than the endeavour it took to properly implement it. ESA, with the full support of the industry working on e.Deorbit, has already decided to keep using that concept for designing the next phases of the project.
Discussion: 3 comments
Which software and methodology has been used for it? Did you adopt ESA-AF or MODAF/DODAF?
For the e.Deorbit contracts, as ESA, we did not impose a specific tool or methodology. This meant that for the different contracts, each of the contractors selected a different tool/methodology .
Has anyone ever been to Good Smaug Vapor Lounge? ;-)
https://addictedtospurs.co.uk/studio-vape-vape-wholesale-near-chicago-60671-il-118254