[:en]
The interplanetary journey between Earth and Mars typically takes nine months. However, this mission will use a longer trajectory that takes two years to make sure that the rover touches down at the beginning of spring and receives plenty of sunlight on its solar panels.
This episode starts after a successful descent and landing on the Red Planet in 2030.
Rosalind Franklin will be the first rover to drill two metres below the surface, and will use novel driving techniques to overcome obstacles.
In motion
Rovers on Mars have previously been caught in loose soils, and turning the wheels dug them deeper, just like a car stuck in sand. To avoid this, Rosalind Franklin has a unique wheel-walking locomotion mode with motor-driven “knees” to swing the wheels forwards and backwards in a carefully synchronised mode. The rover uses its wheels in an insect-like fashion to improve traction on soft soils and slopes, such asdunes.
In this episode, the rover approaches a hydrothermal location loosely modelled on what NASA’s Spirit rover encountered on Mars at the Home Plate site in 2006. The area is slightly elevated with a few mounds that could be the remains of some wind-eroded vents. Since fluids could have broken through the vents, this represents a very interesting formation to look for biosignatures – the evidence of past or present life.
Rosalind Franklin uses wheel walking to climb the initial slope, some two metres tall. Wheel-walking combines rotation and extension to move the rover forward without slipping much. Once on top, the rover approaches the exposed bedrocks for a more detailed investigation.
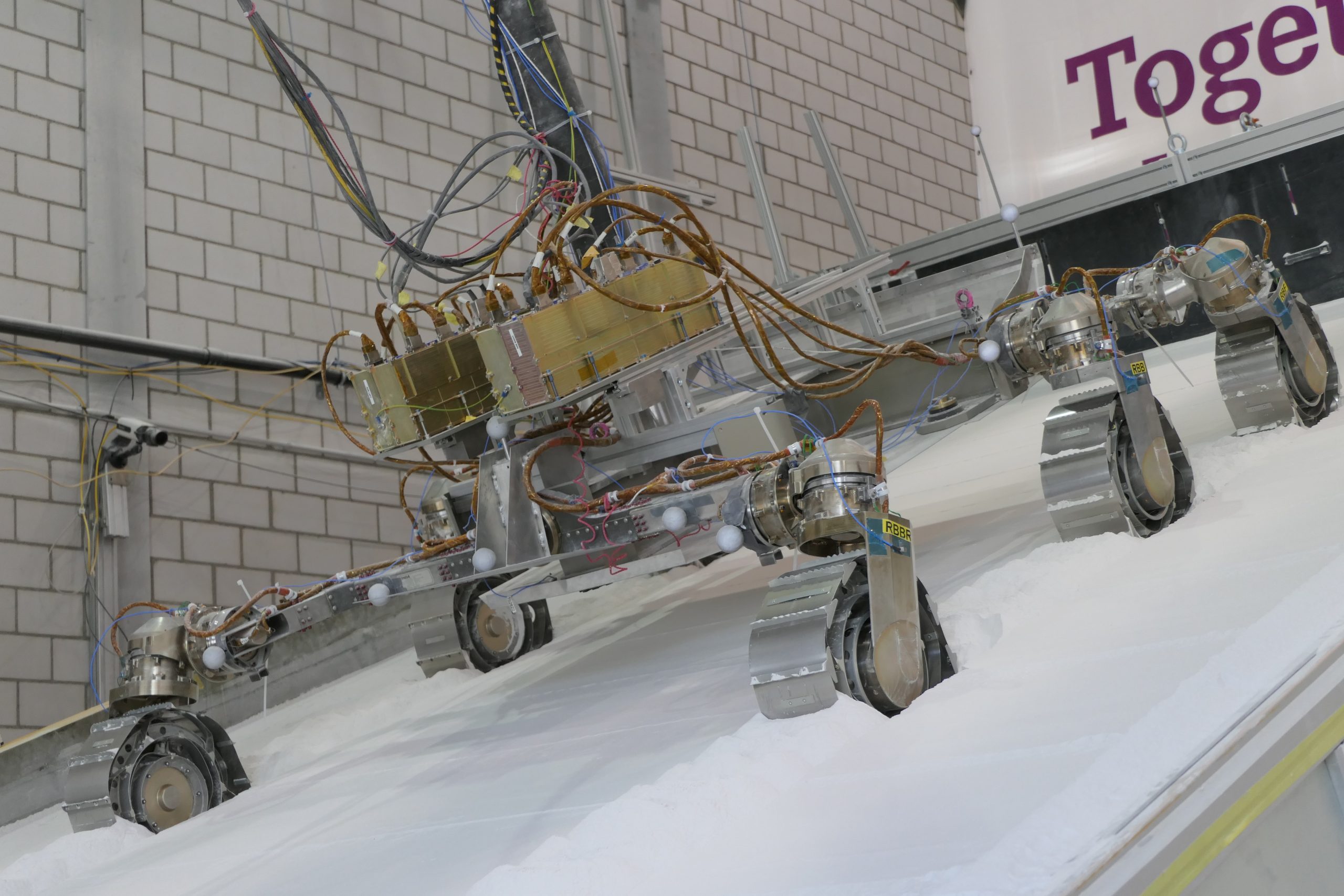
ExoMars wheel-walking during locomotion tests in Austria. Credits: ESA/N. Vicente
Vision
The scientific eyes of the rover are set atop the mast on the Panoramic Camera suite, known as PanCam. From its vantage point about two metres above the ground, PanCam cameras come into play to get the bigpicture of the site with high resolution imaging.
Panoramic and close-up images of the terrain are essential to understand the geological context and to help scientists on Earth study targets in more detail.

Rosalind Franklin can move sideways, like a crab. The rover’s cameras can build panoramic mosaics while crabbing in front of outcrops.Credits: ESA/Mlabspace
The two wide-angle cameras (WACs) are set 50 cm apart to form a stereo pair that images what is in front of the rover. Scientists can create 3D pictures and depth maps by overlaying simultaneous snapshots.
The High Resolution Camera (HRC) is useful to study very fine details in outcrops, rocks and soils, such as rock texture, laminations and grain size in colour.
Rainbows on Mars
Humans can only see colours in visible light. PanCam can ‘see’ in 19 colours, in the visible and near infrared wavelengths. Each of the wide-angle cameras has a filter wheel with 11 positions to look at the colours of the rocks and the martian sky.
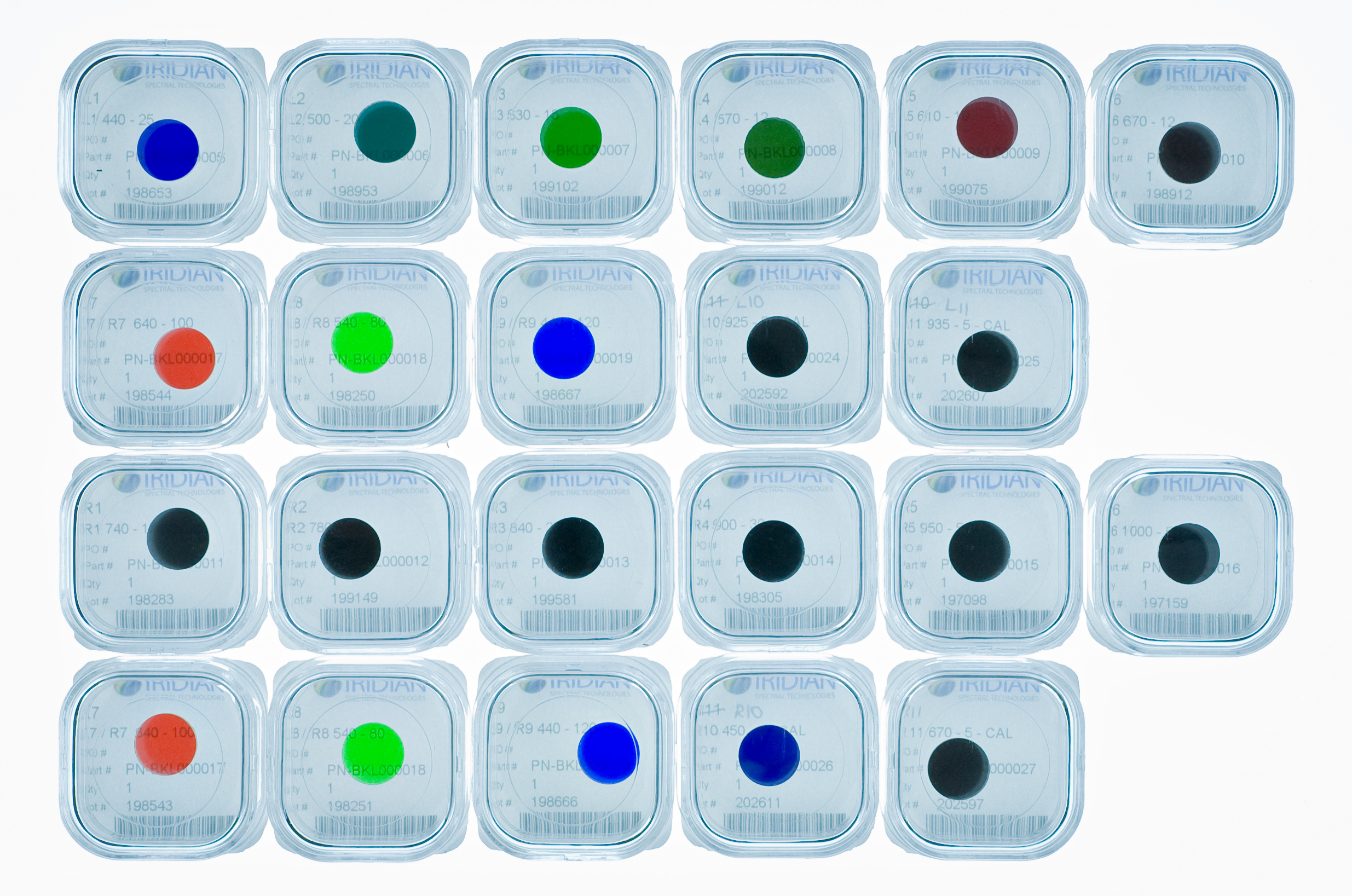
ExoMars PanCam filters. Credits: M. de la Nougerede, UCL/MSSL
Enfys, meaning rainbow in Welsh, is an infrared spectrometer to study mineral composition. Enfys is a point spectrometer that provides a reading in a spot situated more or less in the centre of an image taken by PanCam’s High Resolution Camera.
Enfys and PanCam work in synergy: PanCam is used to obtain colour and visual information of what lies around the rover, while Enfys’ job is to inform scientists of what minerals are present.
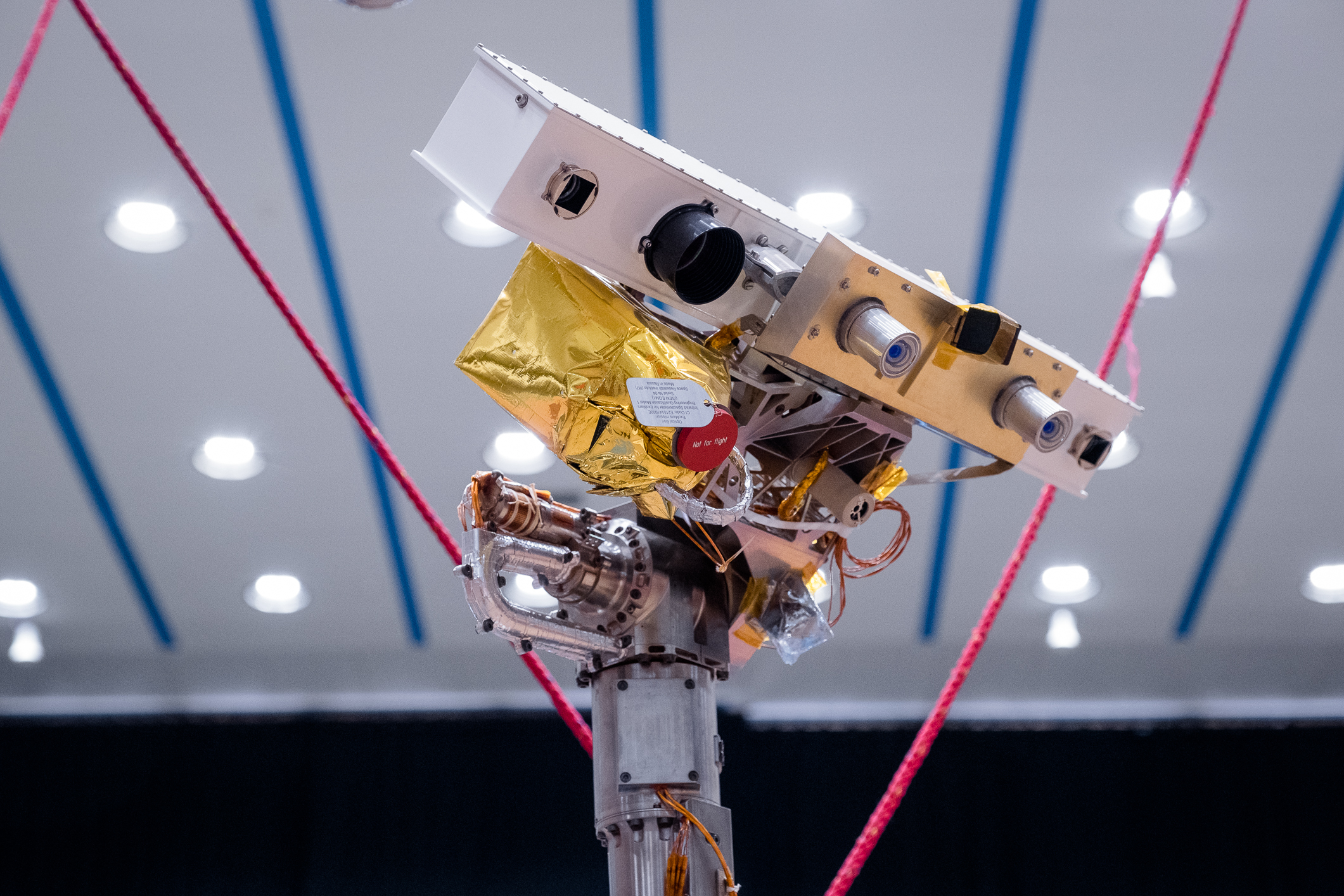
Rover eyes. The PanCam suite during tests in a Mars terrain simulator at the ALTEC premises in Turin, Italy. Credits: Thales Alenia Space
A major goal of this exploratory phase of the mission is to understand the geological context and identify minerals formed in the presence of water that could be good targets for drilling into and collecting samples for analysis.
Stay tuned for Episode 2 to watch how the rover “sees” into the subsurface to plan drilling operations.
Sketch of a hydrothermal site for the Rosalind Franklin rover animation. Credits: ESA/J. Vago
[:]
Discussion: 2 comments
Some information and visuals about the planned European build landing platform would be nice. Thanks!
An excellent lesson in how to build on what came before, adding your own, new ideas. I think that this has all the makings of a very capable and potentially exciting mission.
Retired Systems Engineer in the Space field.