“Pass on what you have learned,” says the Master Yoda in The Last Jedi. The ins and outs of a European rover that was meant to fly to Mars are helping to show the path to future exploration missions in our Solar System.

Engineers from ESA and Airbus came together in June for a test campaign that simulated the fetching operations of the now descoped Sample Fetch Rover. The initial concept of the Mars Sample Return campaign envisioned the rover moving across the Red Planet to collect lightsabre-like tubes filled with samples dropped by NASA’s Perseverance rover. The European rover was to collect the sample tubes with a lightweight robotic arm and deliver them to a lander and sent back to Earth.
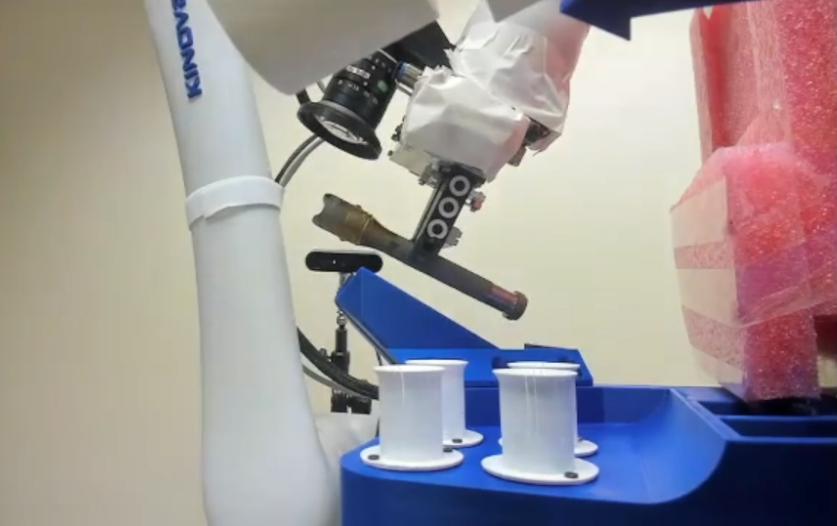
The team used an upgraded version of the Sample Fetch Rover’s acquisition system to mimic the fetching of the sample tubes, from detection to storage, in an autonomous way. All the elements – hardware and software – that would have been involved in that particular phase of the Mars Sample Return campaign were part of the test.
Three high-definition cameras mounted on top of a mast and on the wrist of the prototype worked in tandem to detect a sample tube. Once the system determined its location and orientation, a robotic arm with a gripper grasped the tube. Visual confirmation of acquisition came next, and finally the tube went into a tray for safe storage.
The test campaign lasted a week and took place at the Airbus site in Stevenage, UK.
‘The greatest teacher failure is’
Not all tests were successful, but the team looked at the failures to learn valuable lessons.
“Failures in this type of simulations help us identify technology gaps and functions to increase the robustness of the system and push the state of the art,” explains Martín Azkárate, robot navigation system engineer at ESA.
Even though the Sample Fetch Rover will not be flying to Mars, ESA wants to demonstrate robotic technologies in the field. “We want to capitalise on all the years of the design work, especially since these technologies are enabling future exploration missions to Moon, Mars and beyond,” says Pantelis Poulakis, who will be soon leading the ESA Sample Transfer Arm project.
Next up will be the integration of the Robotic Acquisition System Breadboard testbed with Airbus’s Field Trial Rover System.
Together the two systems will become the newest integrated rover breadboard, combining autonomous rover navigation and sample fetching later this year.
Laura Bielenberg, ESA graduate trainee for the Mars Sample Return campaign, contributed reporting from Stevenage.
Discussion: no comments