Testing technologies for Mars exploration is part of Laura Bielenberg’s daily job, an ESA graduate trainee for the Mars Sample Return campaign. She moves with ease around a rocky recreation of the Red Planet at ESA’s ESTEC technical centre in Noordwijk, the Netherlands. The nickname of this test site is the ‘Mars Yard’ and it is part of ESA’s Planetary Robotics Laboratory.

Laura drops a tube on the reddish soil, not too far from a metallic structure with a robotic arm. The tube is a replica of the hermetically-sealed samples that NASA’s Perseverance rover is leaving on Mars with precious martian soil inside. They are called RSTA, short for Returnable Sample Tube Assembly, and to most people on Earth they look like lightsabres.

She is working on a testbed called the Rabbit (RAS Bread Boarding In-house Testbed) that replicates a precise collection system that was meant to be part of ESA’s Sample Fetch Rover. Although the European rover was cancelled in 2022, the technology behind it remains key for the Mars Sample Return campaign.
The Sample Transfer Arm is still needed to load the sample tubes from the martian surface for delivery towards Earth. ESA’s robotic arm will collect them from the Perseverance rover, and possibly others dropped by sample recovery helicopters as a backup.
Laura is investigating sample tube collection strategies, from autonomous detection to pose estimation of sample tubes on Mars.
Besides cameras and sensors, the team relies on neural networks to detect the tubes and estimate their position and orientation. Inspired by the way the human brain works, neural networks mimic the way biological neurons signal to one another. These computer algorithms were developed together with the Katholieke Universiteit Leuven, in Belgium.
“The neural network will first detect the tube in the images from a navigation camera sitting on top of the structure. Secondly, it will identify points in the image to estimate the pose of the tube on the ground,” explains Laura.
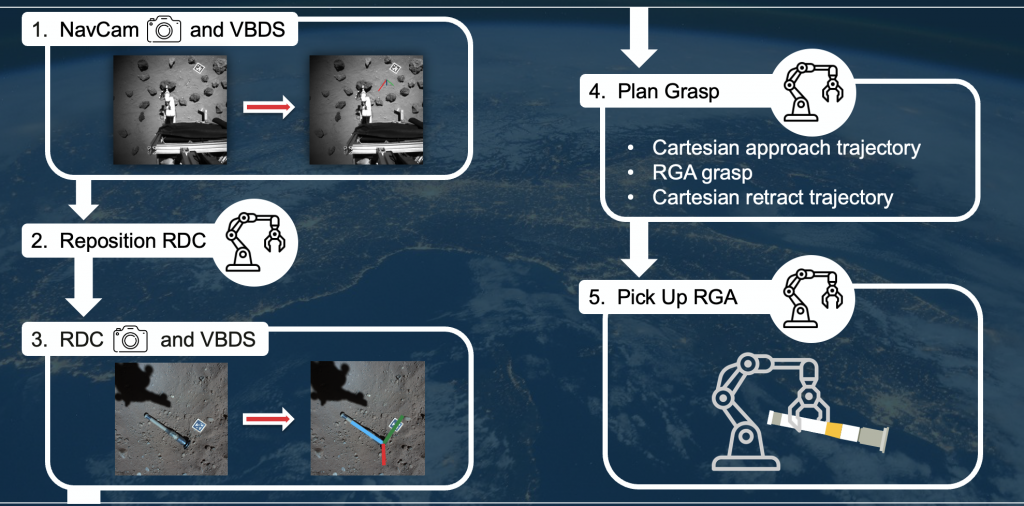
The team tried to recreate the martian environment by simulating similar lighting and terrain. “We have a mixture of direct and indirect lighting, and we worked around different types of terrain, combining sand, pebbles, and flagstones. All these scenarios were essential to train the neural networks for robust tube detection,” she adds.

The goal of the mission is to bring samples from Mars back to Earth. “It is going to be the first time that scientists have the chance to analyse martian regolith in their laboratories here on Earth. It is amazing to work on the research that leads to a robotic system for Mars and to think that we can contribute to finding out something about the composition of another planet in our Solar System,” she concludes.
Discussion: one comment
Simply fascinating, thanks for all the hard work!