I have always been fascinated by remote-controlled vehicles. Like many kids I looked in amazement at remote-controlled cars and boats in the park and was eager to have a go whenever I could. As a young teenager I loved building, flight-testing and all–too-often crashing my radio-controlled aircraft. I learned the hard way that an aircraft’s centre of gravity was rather important when it comes to stability and control! As an adult my passion for remote-controlled vehicles has not waned, which is why I’m particularly excited about an upcoming experiment where I get to drive a remotely-controlled rover on Earth…from here in space.
![]() Remotely-operated rovers and robots can be life-savers in disaster areas where humans cannot safely explore, such as searching for earthquake survivors or investigating nuclear disasters. Another area humans cannot easily explore is the surface of our neighbouring planets and moons, but controlling a rover millions of kilometres away poses many challenges. For example, a command sent to the Curiosity rover on Mars can take up to 24 minutes to reach the plucky rover, and the operators need to wait the same amount of time again to see the result of their command! This time delay makes for slow progress and does not allow real-time response to a rapidly changing situation.
Remotely-operated rovers and robots can be life-savers in disaster areas where humans cannot safely explore, such as searching for earthquake survivors or investigating nuclear disasters. Another area humans cannot easily explore is the surface of our neighbouring planets and moons, but controlling a rover millions of kilometres away poses many challenges. For example, a command sent to the Curiosity rover on Mars can take up to 24 minutes to reach the plucky rover, and the operators need to wait the same amount of time again to see the result of their command! This time delay makes for slow progress and does not allow real-time response to a rapidly changing situation.
ESA’s Meteron project is looking at a way to not only reduce this time delay but also make the command path robust against signal interruptions that may occur over long distances with multiple relay stations. Astronauts enroute or orbiting Mars could control a rover with much less time delay in order to scout new areas or prepare a space base in advance of humans arriving on the planet’s surface.
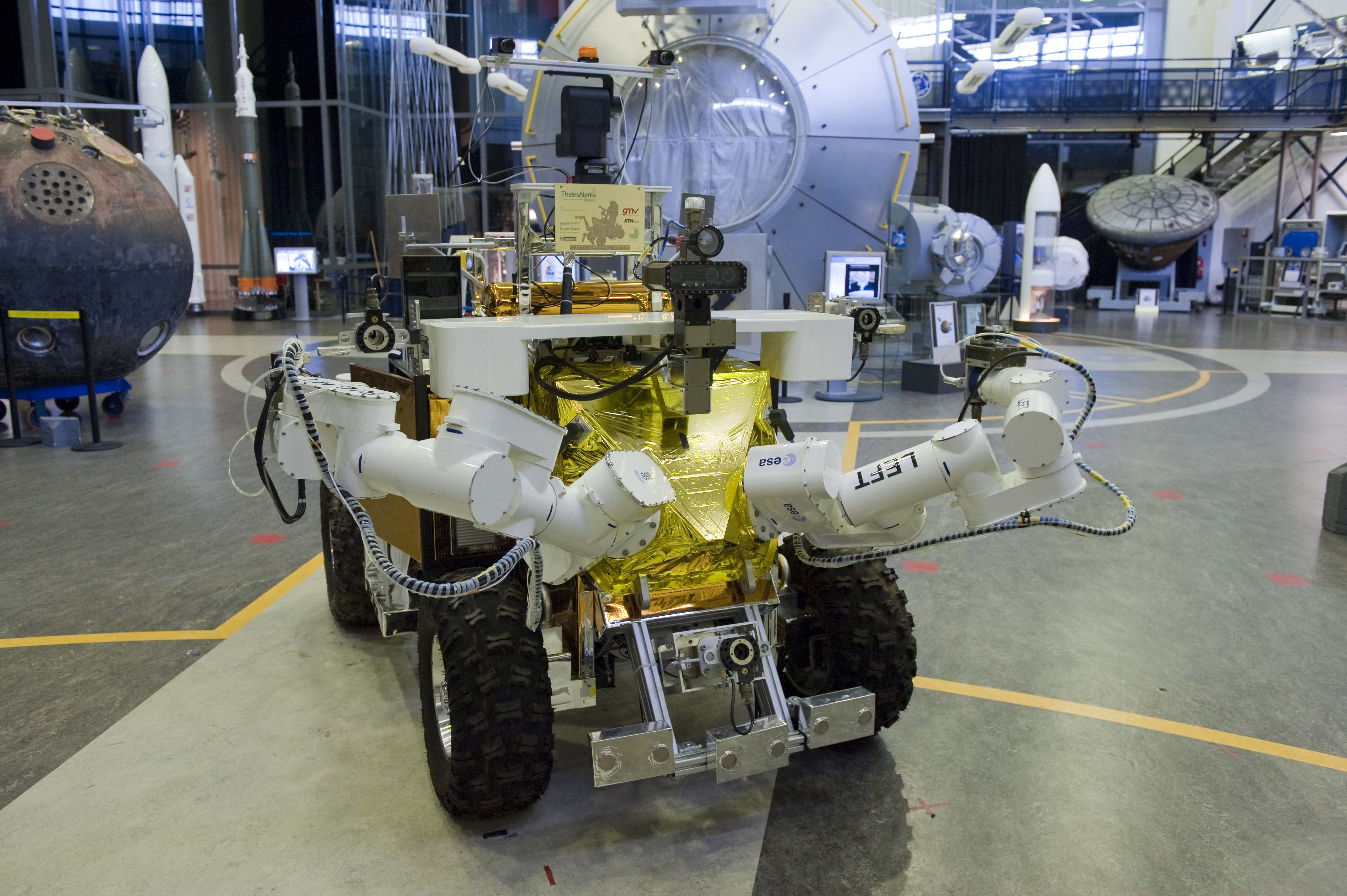
Eurobot. Credits: ESA
Space-rover driving-license
On March 17 and April 25 I will be part of an experiment to drive two different rovers from Europe’s Columbus laboratory. At first glance it might seem easy to operate a rover from space – the hard part would be getting astronauts and the rovers to their destination – but the communications network and robot interface need to be built from scratch and tested to work in microgravity.
On Thursday I will be driving Eurobot at ESA’s technical centre in The Netherlands in a two-hour experiment. The Space Station flies at around 17 150 mph (28 800 km/h) and completes a full orbit of Earth every 90 minutes, so throughout the session my commands could be beamed directly to the car-sized rover while at other times the Space Station will be on the other side of the planet – so commands need to be relayed through satellites and multiple control centres. To keep everything going smoothly engineers at ESA’s operations centre created a new type of ‘space-internet’ that adapts to the changing connections and network speed.

Eurobot with mock lunar module. Credits: ESA
In the experiment this week Eurobot will be near a mock-up lunar base that has a problem with its solar array. It is up to me to locate, grab and unjam the solar panels.
Few astronauts have got their real-time ‘rover wings’, so I am excited to be joining the exclusive club that includes NASA astronaut Sunita Williams, and my ESA astronaut colleagues Alexander Gerst and Andreas Mogensen who have already gotten their space-rover driving-license. This week’s experiment is similar to Andreas’s Eurobot experience during his Iriss mission last year but the Meteron engineers have added an extra challenge this time: they want me to fix the solar panel manually. Whereas Andreas commanded the rover to locate the solar panel I will be testing a new part of the software by finding the solar array interface and directing the rover to make contact.
Mars rover in the UK
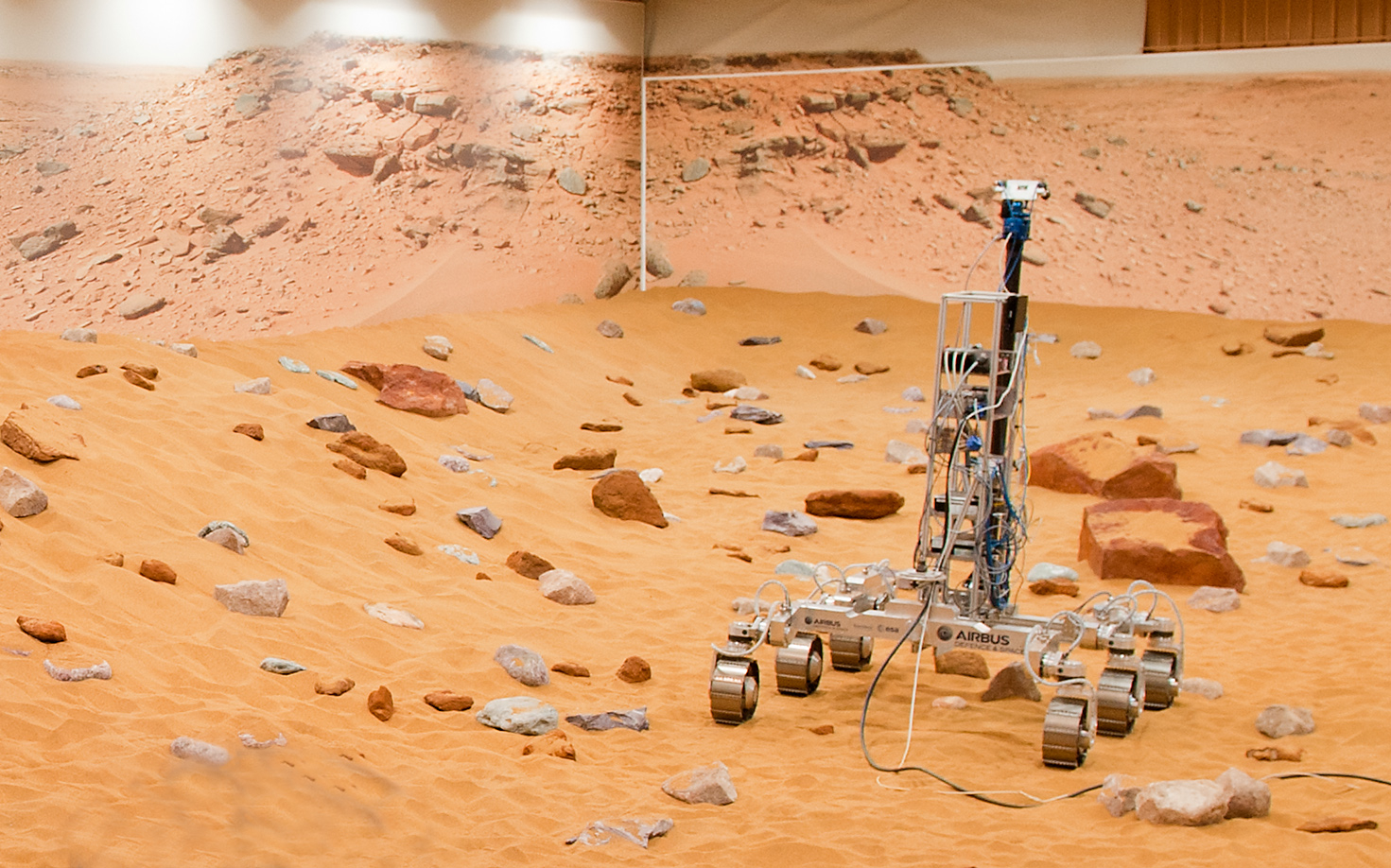
Mars rover at Stevenage Mars Yard. Credits: Airbus Defence and space
In April the second Supvis experiment promises to be even more interesting as we will be upping the ante again. In coordination with the operations team at the ESA’s mission operations centre in Darmstadt, Germany I will be driving a rover called Bridget at the Airbus Defence and Space “Mars yard” in Stevenage. The goal in this experiment is to navigate a landscape similar to a Martian cave or a Moon crater – but I will have had no foresight whatsoever for this task: the goal is to see how well an astronaut-robot system can adapt to unforeseen scenarios. For this experiment I am being kept in the dark – literally. To test the system to its limits the experiment will be run in the dark – as if it were exploring a real cave . Considering that typical rovers find it difficult to make sense of their environment in these conditions, this experiment is about putting the human in the driving seat for these challenging operations in the dark. Let’s hope that my skills have improved somewhat since those early days of flying radio-controlled aircraft!

Color-modified image of Bridget rover testing at the Atacama desert. Credits: Aribus Defence and Space-E. Allouis
Discussion: 6 comments
Wow, you need to have real patience to drive the first piece of machinery – everything is really slow and precise. I wish you luck! Hopefully if it I’d all bring shown online, I will try to remember to watch, but have a feeling I have a meeting; either way – hope you nail it! However it goes, you are doing us proud in the UK… From the land of the Crooked Spire in Derbyshire – we salute you!
Wonderful article. More like it please!
Always enjoy reading your articles – especially this one. A very exciting time and hope all went well with the experiment. You must be having the time of your life!
Cool, the Mars cave sounds especially fun! I was surprised how big the robot is once I saw the video. I hope as the experiments progress they can incorprorate VR and haptic feedback if not already. Maybe they’ll simulate some realistic habitat or in-situ resource utilisation setup tasks in due course.
Thank you for the inspiration Mr Peake. Wishing you well.
https://youtu.be/nKE8Ji10LDQ
Cooking is my passion. I love spending time in the kitchen