Regular followers of this blog will have noticed that we had a short pause in our routine “CometWatch” updates while we focused our outreach efforts on the landing site selection. NAVCAM images are of course still being taken – the navigation camera is crucial for navigating around the comet – but at the same time, the way in which the images are being taken has changed.
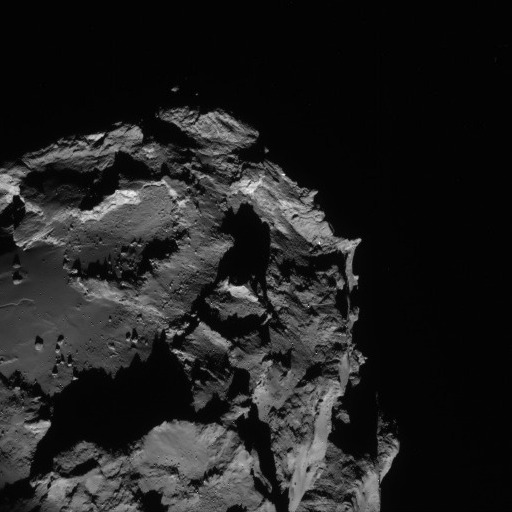
Comet 67P/C-G from a distance of 61 km on 23 August. The image is a 512 x 512 pixel crop of the full frame NAVCAM image below. Credits: ESA/Rosetta/NAVCAM
Until now, each NAVCAM image has covered the whole comet in one shot, but now that Rosetta is about 50 km from the comet, the nucleus is close to overfilling the NAVCAM field, and will do as we get even closer. As a result, on Saturday we started taking NAVCAM image sequences as small 2 x 2 rasters, such that roughly one quarter of the comet is seen in the corner of each of the four images, rather than all in just one shot. An example of one of these 512 x 512 pixel ‘corner’ images is shown above, which was taken on Saturday from a distance of 61 km (the full frame 1024 x 1024 image is also shown below). At this closer distance, the details of surface features are becoming much clearer.

Full frame NAVCAM view of comet 67P/C-G taken on 23 August. Credits: ESA/Rosetta/NAVCAM
The primary objective of the NAVCAM is navigation and its images are used by ESOC to identify and match the location of landmarks on the comet at different times. This information is then fed into the navigation process to improve orbit determination. The raster technique is used to ensure that the comet is always seen by the spacecraft and compensates for any uncertainties in the spacecraft’s trajectory close to the comet. The four images thus cover the uncertainty in the pointing, ensuring that the comet is always seen in each raster, and that in at least one of the images enough of the comet surface is seen to allow landmark recognition.
As Rosetta is slightly repointed for each image, there is a time delay of about 20 minutes between the first and the last image being taken in each four-image sequence. In that time, Rosetta moves and the comet rotates, changing the appearance of features and shadows slightly. This complicates the making of a composite image and no software has been developed to do so, as the individual images do not need to be stitched together to meet the navigation requirement.
Today we are posting a ‘corner’ image to illustrate this change in the operations of NAVCAM. In the near-term, we aim to share more images from a given NAVCAM sequence, but the number and frequency may vary depending on the navigation activities on any given day.




Discussion: 35 comments
Now it is going to get interesting as the probe gets closer to the Comet.
Clive
Oh very interesting to get the view of a picture of the comet again that is fresh. This might happen if ESA is in a good mode and of course if the Rosetta mission is still running without problems which i am afraid is not the situation any more.
This picture is over a week old, sure something is wrong.
Hope for the best to get a picture soon
In a scale from a trip Amsterdam -> Paris (500 KM), Rosetta has now reached the Eifel tower as close as 0,765683375 millimeters.
Time for a kiss….
The peaks appear very sharply-pointed at this resolution; does this imply that the outgassing and material released, when the comet has been warmed during previous encounters with the sun, has not caused significant erosion? Would any erosion have been expected, or is the material very dispersed? Do any high-res photographs show the same sharply-defined features?
Hello,
sharp peaks may just be the consequence of
very recent outgassing activity.
Let’s just hope Rosetta won’t face the “explosion/lightning” as temple 1.
Maybe both objects are differently Electrically loaded and as soon Rosetta is close enough both objects will “neutralise” the electrical difference, by transferring the electrons to the other object.
Rosetta did not go through the “dust” of the comet to have an slow “electron transfer”.
I agree a large electrical discharge is the potentially the highest risk at this mission phase. Does the spacecraft have an electric field detector? For various charging models what is the risky approach distance? I would presume that as jets occur that that distance could be significantly less as the jets would likely be a electric field conduit. If I were running the show I would perform as much high resolution OSIRIS mapping as feasible immediately in case the spacecraft gets zapped from a discharge. When you have spent so many resources getting there – you get as much high resolution data early on as possible.
thx for this nice and friendly explanation, so no one is disappointed. But as for me, and i guess a lot of other people, we would like to see the 2×2 Picture.
I bet there are people, capable of stitching it together manually in Photoshop or what not, but with 2×2 or even 4×4 its better to know, what to look at, even if it looks ugly on first sight. Thx in advance.
I agree with Benjamin!
It woud be great, if you releas a complete 2×2 set.
Dave, yes the comet surface material has sharp edges, it is most likely from a “flaking off” effect from top layers of surface material ejected or otherwise lost by underlaying pockets of heated/energized of vaporized/offgassed substrata blown out. It is erosion, but in effect from the inside out, vice outside in line we are familiar with on Earth. I suggest that comets with a higher % of volitials with a shorter obit period are more likely to have this surface. Of course this makes the comet probe landing location and the results found even more interesting…
What is the resolution of these images now (m/pixel)?
Similarly, what is the available resolution on the OSIRIS images at this distance – though perhaps “available” is the wrong word, as anyone following this blog could be excused for not knowing that OSIRIS even exists, since those images (with extremely rare exceptions) continue to be hidden from us mere mortals!
Navcam: 5.2 m/pix
OSIRIS NAC: 1.1 m/pix
OSIRIS WAC: 6.2 m/pix
Images from the OSIRIS NAC are now on par with best images of cometary surface ever obtained by Deep Impact Impactor in case of comet Tempel 1. But Impactors hi-res images had 64×64 pixels, OSIRIS has 2048×2048.
All OSIRIS images from 2014 will be published next year (in May or June) in the one batch. It’s inconvenient but I think that NavCams images are good substitute for them.
They probably just don’t want us to see all the little aliens running around on the comet.
Thank you for the update Emily
Just out of curiosity, why not use the OSIRIR WAC for navigating now, since it has a field of view four times the NAVCAMs?
I think because it was not planned from the beginning, and developing a software for that requires time, which can be better used by the OSIRIS team for the selection of the landing site of Philae within the next months.
NavCams (they are two of them on Rosetta) are specially constructed and designed for navigation. They are part of system which consist two imaging Startrackers, two NavCams and electronics with special software with multiple modes. I suppose that it would be possible to navigate using OSIRIS WAC but why when Rosetta has special system for this task.
Thanks, guys. I didn’t think about the star trackers and other software/electronics. Those are good points. But ESA has to physically reorient the whole craft to take the raster images with the NAVCAMs and it seems like a lot of trouble to have to do that all the time.
I wonder if they could take a WAC image simultaneously with the NAVCAM and layer the two for context, rather than have to stitch together several NAVCAMs. Or are the cameras not always pointing the same direction?
I know the OSIRIS team is busy looking at details for Philae. Anyway I’m sure they have a good reason for the way they have distributed operational duties.
Thank you for the new NavCam image!
Wow !
Fantastic, 61 km……go, rosetta…
I can hardly wait for november 11 !
This is Fantastic. This is where we will find life, maybe little green microbes.
Hi Francis, are you kidding or ist this for real?
I’m with you Francis – Finding life is a real possibility. Sure, instruments haven’t even been sterilised properly; no specific experiment exists on the craft specifically to detect life, but evidence may still be found.
No life will be found on any comet but if lucky building blocks that can origin in life in a less hostile environment might be found. But as me and you are the evidence to this conclusion that was easy to find out, right?
Regarding image releases: why not combine the 2×2 array of images into a single file, maybe with lines separating them to make it clear they are distinct frames? Then all the data are there for the image magicians in the amateur community to have fun trying to mosaic them, but you only have a single file to upload to the ESA website each day.
Enjoy! https://blogs.esa.int/rosetta/2014/09/01/make-a-navcam-mosaic/
Woohoo! Thanks!
As you have got closer, we all were expecting a close up picture, so that the detail of the surfaces will begin to be revealed.
At the moment from your pics, there is often a faint line showing on the flat surfaces, that looks like yet more craters hidden by dust or possibly the lack of resolution..
Do yo have anything, with better resolution now rosetta is nearer that you could share.
It would be nice to have all four images of one 2×2 matrix even if you could only release it one frame at a time over four days.
The overlap in the frames would lend itself to great anaglyphs. Seeing as they would get taken at slightly different positions in relation to the comet.
I have reverse engineered all the spacecraft positions relative to the comet for all the public navcam and osiris images taken since the beginning of august.
I have enough data to be able to stitch these images together almost automatically now.
Bring it on!
Sharp peaks and very smooth looking areas.
I’ve been trying to think for a while what 67P/C-G reminds me of.
This image twigged it for me.
I am a mechanical engineer and what this image reminds me of is the leftovers (slag) from a hot casting.
Particularly if brass or bronze has been cast the ‘sprues’ or ‘runners’ that are broken off after casting can have this appearence of peaks and smooth surfaces, although the smooth surfaces usually show some striation.
I am in no way suggesting that metals are involved here, but the similarity is striking.
Where is the brightness information? What is the average brightness within the camera dynamic range? How dark IS this object?
Of even more interest would be corresponding pictures showing the ‘outgassing’ in relation to the present image. Is outgassing still coming from the bridge area as implied in the earlier overexposed pics?
So sad if something is broken and Rosetta is lost
From the looks of some of the pictures they should have packed some skis.