Update from ESA’s Charlotte Beskow, now at ATV-CC with the Engineering Support Team.
Our Russian friends have arrived. As always it is a pleasure to see them!

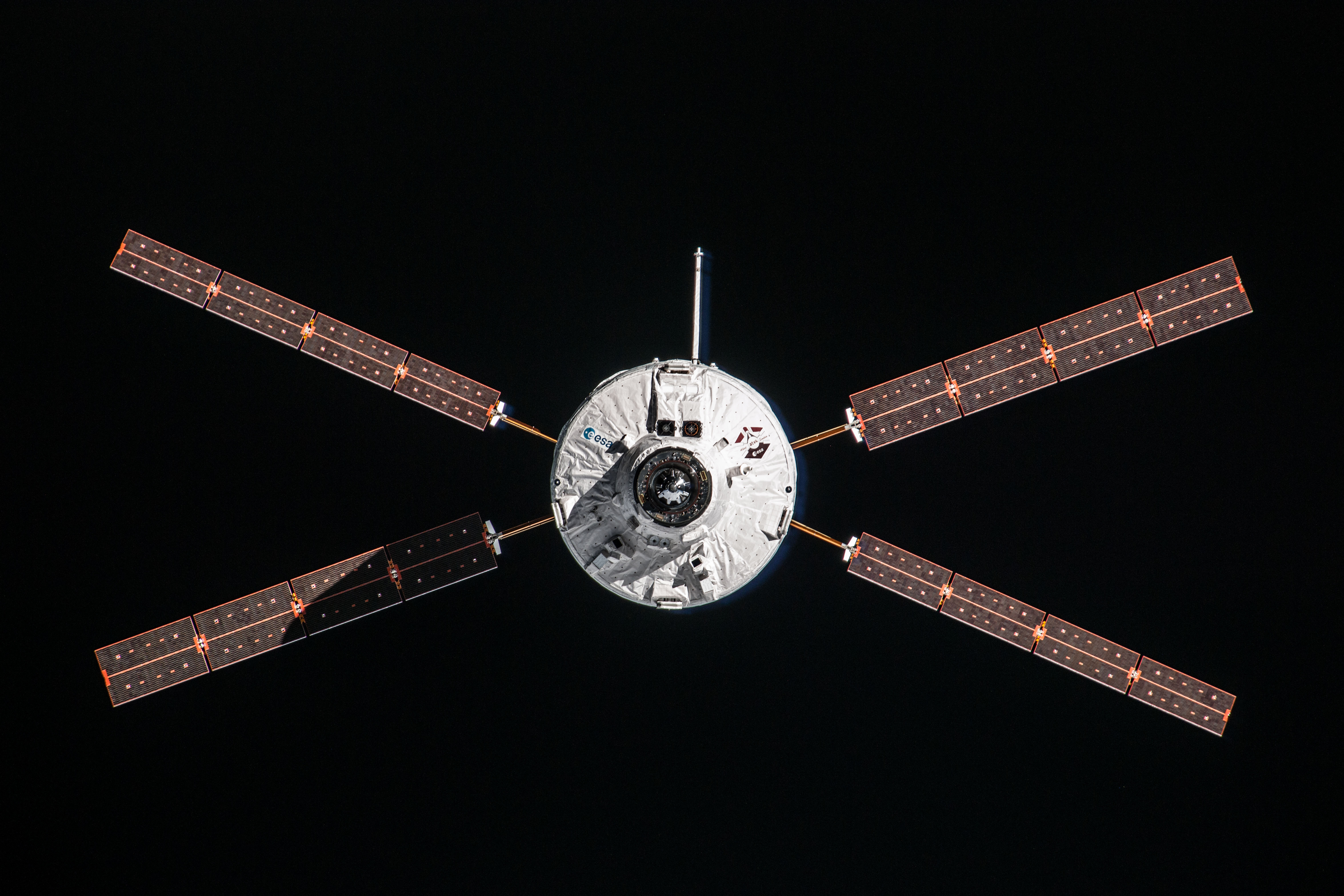
ATV Albert Einstein, Europe’s supply and support ferry, docked with the International Space Station on 15 June 2013, some ten days after its launch from Europe’s Spaceport in French Guiana. Credit: ESA/NASA
ATV uses the same docking port as Soyuz and Progress vehicles, and when ATV docks on 12 August (fingers crossed), it will do so using the active half of the same Russian docking system as is used on Progress and Soyuz vehicles (the passive half is installed on the Service module of the ISS). This means that ATV is carrying Russian equipment, fully integrated into the vehicle system design. This system also encompasses the refuelling functions as well as the power and data connections to the ISS. The set-up for these interfaces is an automatic process that starts as soon as the docking probe head detects contact with the ISS and which lasts roughly 40 minutes. Once this set up has been successfully accomplished, ATV will be ready to start its ‘real’ mission to the ISS.
Several different teams follow this docking process closely: the flight control team here in Toulouse, the engineering support team (augmented by our Russian friends) also here in Toulouse and Russian experts at the Mission Control Centre in Moscow (MCC-M) – joined by our own EST representatives located there.
It is a credit to the perseverance of all the teams that these complex ATV systems, described in Russian and fully mastered only by the Russian engineers, were successfully integrated into a European vehicle designed mainly by French and Italian engineers, using documentation in English. During the multi-year process [of developing ATV] we all acquired mutual respect for each other’s knowledge, a smattering of common vocabulary and a lot of admiration for the interpreters, without whom none of this would have been possible.
Tomorrow they, too, will be on console together with the rest of us, ready to help in case something does not go according to plan. I’ve said it before but it bears repeating : ATV is all about teamwork.
– Charlotte
 Automated Transfer Vehicle page
Automated Transfer Vehicle page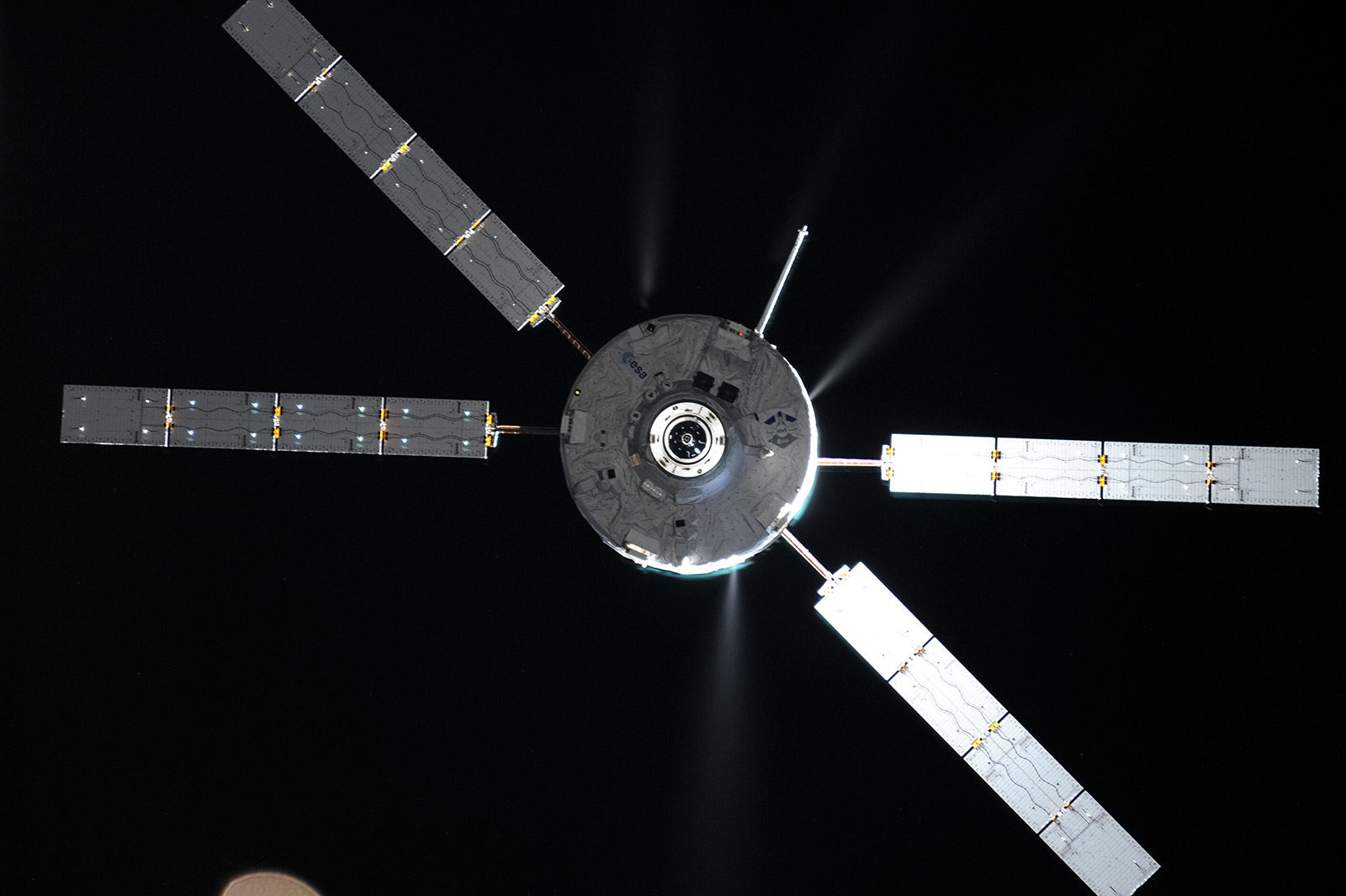 ATV blog archive
ATV blog archive
Discussion: no comments