Update from Charlotte Beskow at ATV-CC for Friday’s Flyunder.
Friday night in ATV-CC, Toulouse. You cannot believe it is 23:30, the place is humming with activities because ATV is busy doing the fly-under. This is a specific operation for ATV-5 (as explained by my colleague Olivier in a previous blog post) that will allow the three specially fitted cameras that ATV5 is carrying on the front cone to be turned on and record images as ATV passes underneath the ISS.
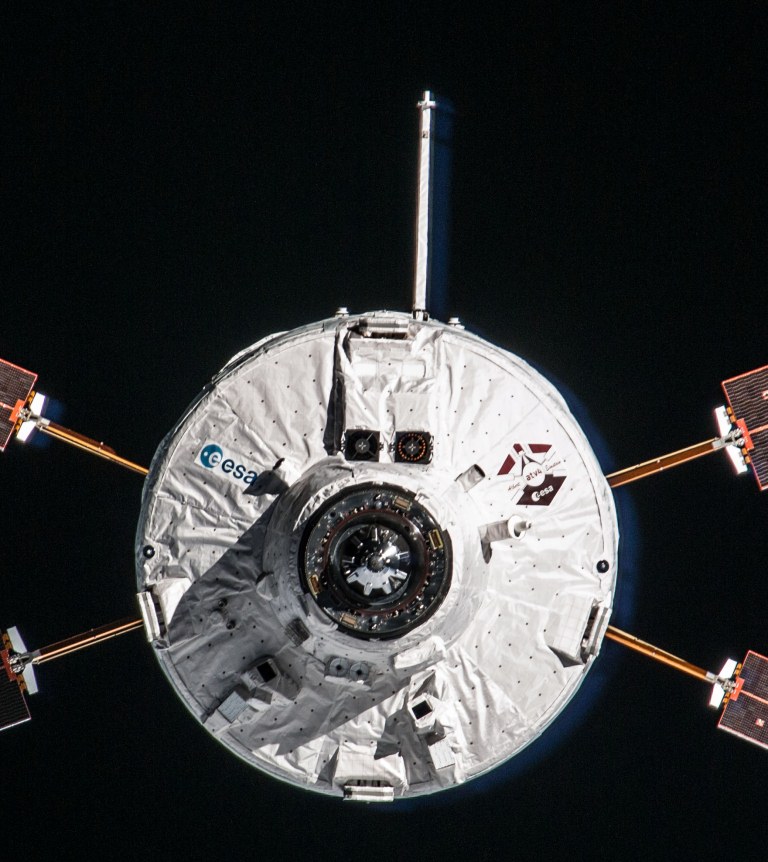 ATV 4 as it approached ISS, 15 June 2013. Credit: ESA |
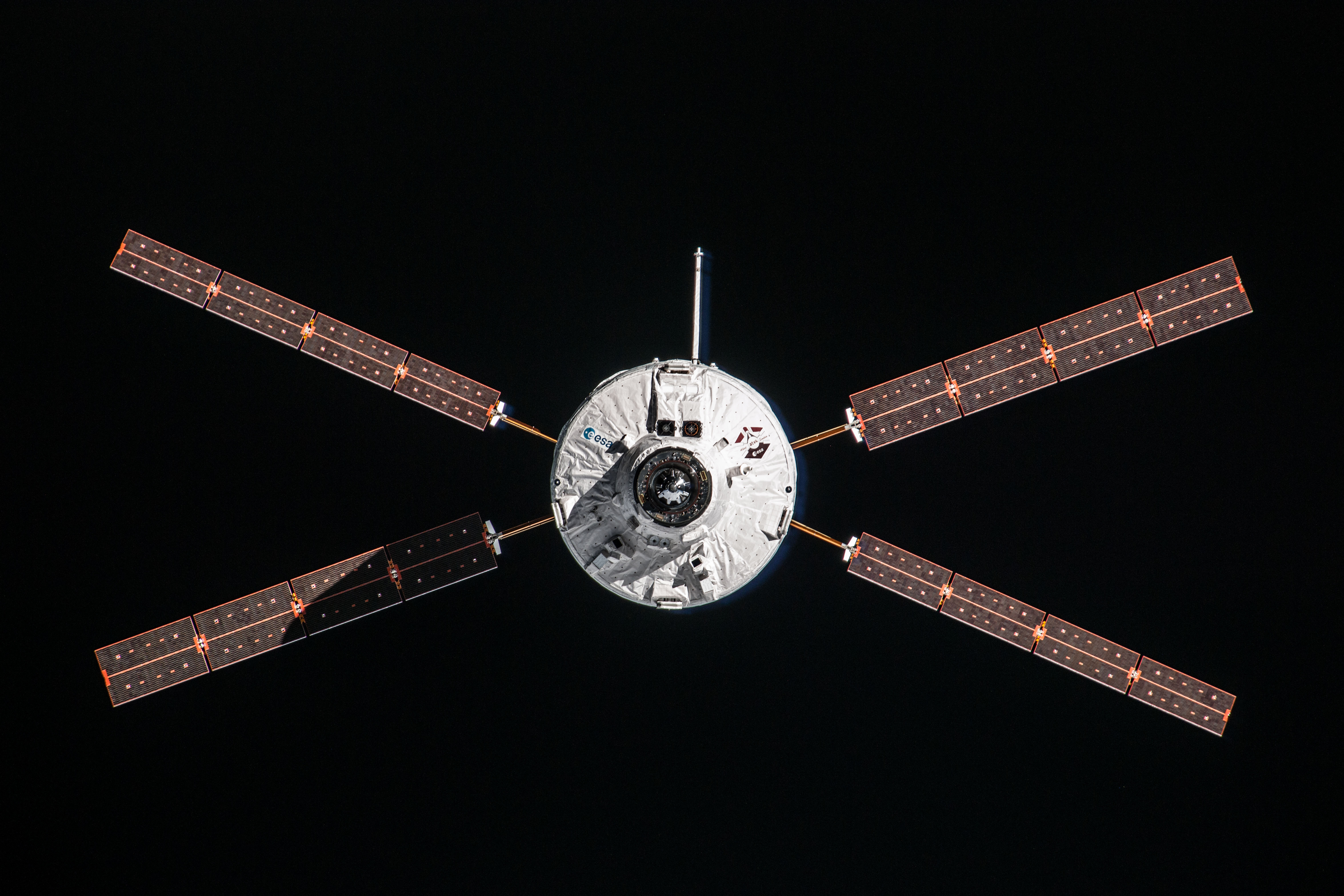
 ATV5 in the BAF, before launch; the cameras are just to the right of the ESA logo. The lidar at the top. Credit: ESA |
Three teams are involved:
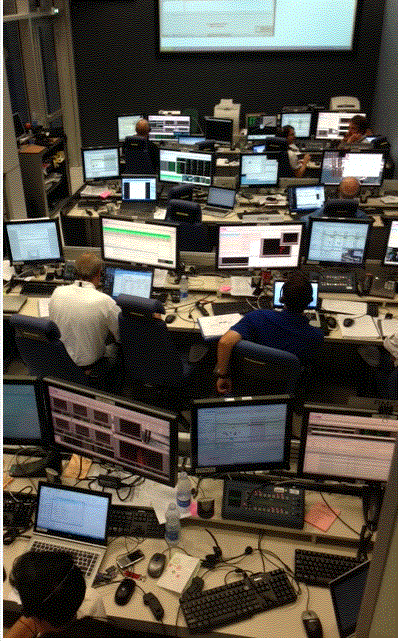
Flight control team

The Flight Control Team, who coordinate operations and interface with the ISS partners and command the ATV. Credit: ESA
Engineering support team
 The Engineering Support Team; tonight the set up is augmented by the team responsible for this ATV-5 experiment. The EST is in room M27 and M34 (the two rooms are connected via camera). Credit: ESA |
 The Engineering Support Team; tonight the set up is augmented by the team responsible for this ATV-5 experiment. The EST is in room M27 and M34 (the two rooms are connected via camera). Credit: ESA |
and then we have the all-important Flight dynamics team, without whom we would not be anywhere near the ISS!
Flight dynamics team

The all-important Flight Dynamics Team, without whom we would not be anywhere near the ISS. Credit: ESA
This last team are the ones ensuring that ATV is where it is supposed to be.
About half an hour ago [23:15] they announced that we were 71 km behind the ISS and 5.6 km below. The target position is to be 5 km below and this will happen around 00:40 CEST (22:40 GMT).
How do we manage this? Well, we could not do it without the involvement of several additional teams since the telemetry that allows us to know what ATV is doing comes to the ATV Control Centre in Toulouse via a very long chain: ATV -> NASA TDRS satellite -> White Sands Ground station in New Mexico -> MCC-H in Houston -> ESA Columbus Control Centre, Munich -> ATV CC.
The commands that teams at ATV-CC send to the ATV takes the same path, in reverse.
Compared to how long it takes for the ESA ground station to communicate with Rosetta (which is busy following that unpronounceable comet; 22 min) we have the luxury of operating in ‘real time’, give or take a bit since the TDRS satellites are located at a distance of 36 000 km from Earth.
Tomorrow is Saturday and here it will be another busy day as ATV proceeds with the orbital manoeuvres necessary to set up the rendezvous with the ISS, planned for 12 Aug.
Never a dull moment!
– Charlotte
 Automated Transfer Vehicle page
Automated Transfer Vehicle page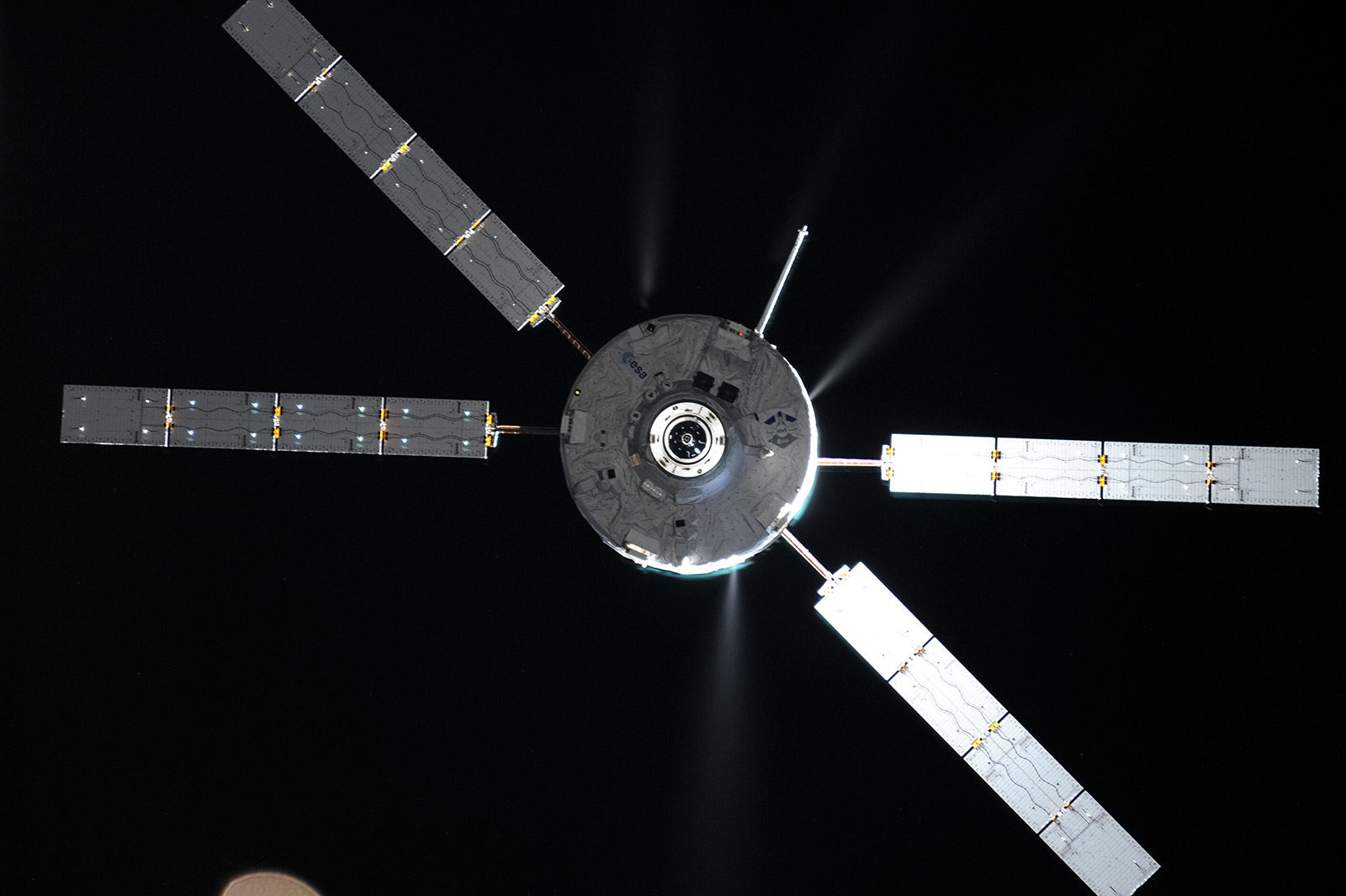 ATV blog archive
ATV blog archive
Discussion: no comments