
ATV-4 imaged by radar with wire grid superimposed Credit: ESA/Fraunhofer FHR institute
You might have seen the wonderful radar images of ATV flying over Earth after its launch last week. Jean-Michel Bois, Nathalie Védie and Laurent Arzel from ESA and Dr.-Ing. Thomas Patzelt, Dr.-Ing. Jens Rosebrock and Dr.-Ing. Ludger Leushacke from Fraunhofer got together to explain the background on these images:
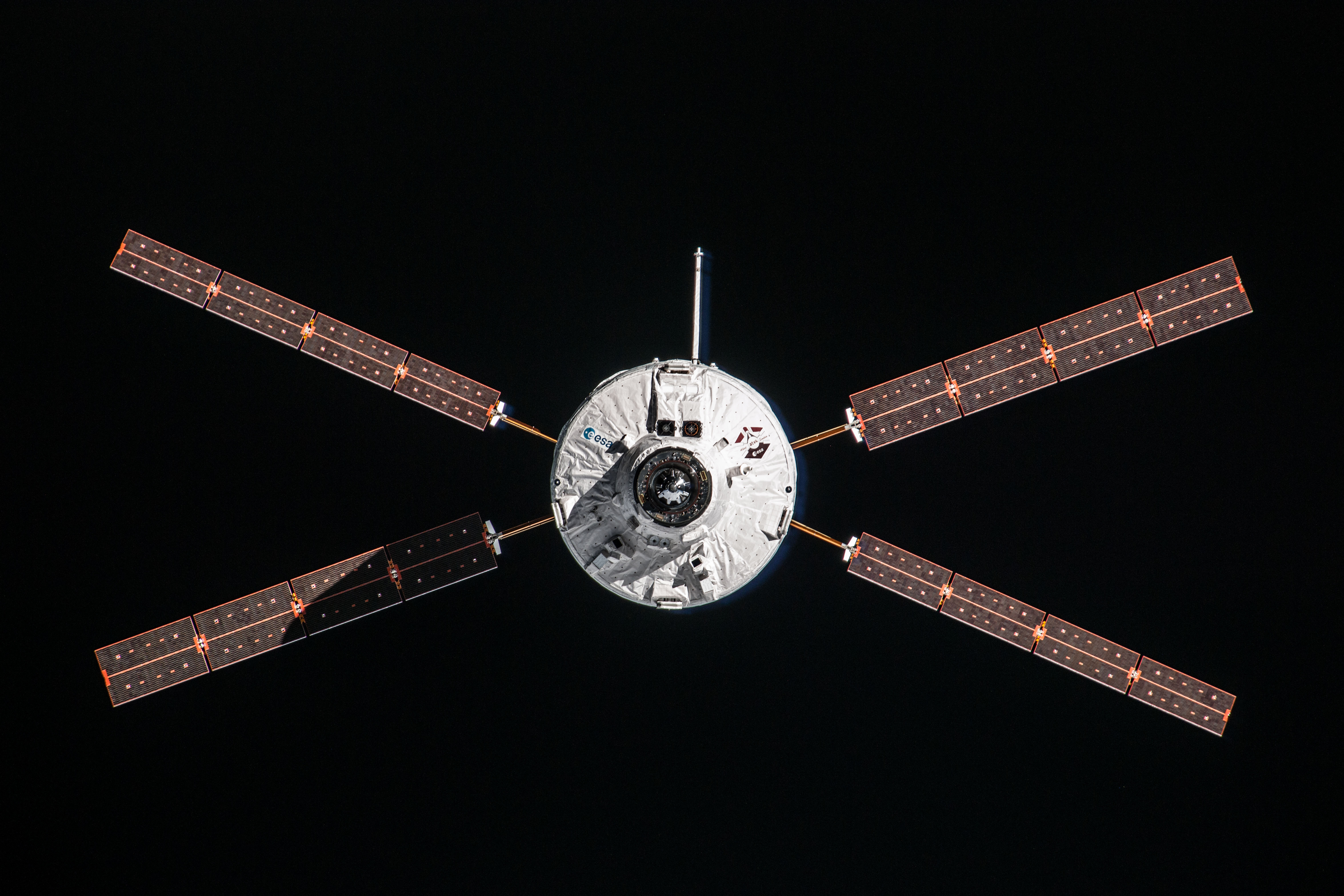
ESA’s ATV Toulouse Operations requested High frequency physics and Radar support from the German Fraunhofer institute to track ATV during its first orbits after separation from its Ariane 5 launcher. The goal is to provide information on the ATV injection and orbit parameters and to assess ATV’s configuration for the Flight Dynamics team. In particular the flight dynamics team was interested in the deployment ATV’s solar panels and of the ADB/KBM boom in the first minutes after the separation.
The ADB/KBM boom supports ATV’s Proximity Link Transceiver used during the rendezvous phase to exchange data with its counterpart on the International Space Station. This data allows for relative navigation between ATV and the Space Station and provides crew monitoring and control of the ATV during docking.
For ATV-2 and ATV-3, the full deployment and lock of this boom were not confirmed by telemetry data, so the final boom position was never confirmed.
To answer this question the Fraunhofer Institute was asked to image the spacecraft using TIRA radar data analysis.
ATV-4 imaged by radar with wire grid superimposed Credit: ESA/Fraunhofer FHR institute
Tests were performed during ATV-3’s free-flight days before its destructive reentry to validate the feasibility of the system, the quality of the radar images and coordination between ATV-CC and Fraunhofer teams and also to check potential ATV attitude changes to optimise the observation conditions for radar imaging, if necessary.
In parallel, a tool was developed by the ESA ATV Operations Division (Nathalie Védie and Laurent Arzel) to reproduce ATV’s orientation in a virtual radar image by projecting a wire-frame model on the radar image plane. Based on real trajectory and ATV attitude telemetry data during the path over the Fraunhofer’s radar station, the virtual wire-frame ATV image can be compared with the radar image. It allows a validation of the ATV configuration and a rejection of the bright radar image pixels due to noise or image generation artefacts.
The combination of the images is a powerful way to assess ATV’s configuration in space. The figures show that the projected image fits perfectly with the radar image.

ATV-4 imaged by radar with wire grid superimposed Credit: ESA/Fraunhofer FHR institute
 Automated Transfer Vehicle page
Automated Transfer Vehicle page ATV blog archive
ATV blog archive
Discussion: no comments