Update: ATV-4 launch 5 June 2013: L – 1 day
(This just sent in by ESA’s Charlotte Beskow in ATV-CC – Ed.)
- ATV4 is transporting cargo to the International Space station:
- Fuel for the Russian engines – 860 kg – loaded 2 & 11 April
- (Russian) water for the crew – 564 kg loaded
- Air (66kg) and Oxygen (33 kg) – 100 kg – loaded 13 & 15 April
- Fuel for maintaining ISS orbit – 2580 kg – loaded 19/20 & 25/26 April
- Dry cargo – 2479 kg done!!
3 June – Monday (a sunny day!)
After a short weekend in Holland, I am back in Toulouse. We are at launch minus two days. There are nominal activities going on: last minute checks, preparation of GPS almanacs, recommendations for the Launch and Early Operations Phase (LEOP) to be finalised, Flight Rules to be obtained, procedures to be distributed, manning of consoles to be finalised, &etc.

Fairing being lowered over top of ATV-4 Credit: Credits: CNES/ESA/Arianespace/CSG Service optique
Tomorrow, we have the last Engineering Support Team briefing and from then on we are on shift, each one according to his/her speciality and the mission timeline.
The timeline is driven by many factors: ISS orbit, ATV launch time, our planned route to the ISS, communication visibility slots, Sun angle, sensor limitations, equipment ON times, &etc. &etc.
There is a whole team of people at ATV-CC who do nothing but planning – and replanning… and then again replanning.
Over in Kourou the fairing (which protects ATV during the initial launch phase) was put in place last Friday, 24 May; all other activities planned between then and today have been successfully concluded.
So, what happens next?
D-2: ATV is switched ON, checked, and then switched OFF again. The batteries are charged.
D-1: ATV is switched ON, checked, some pyrotechnics are armed, GPS almanacs are loaded and thermoswitches are checked – as are the comm chains – and then ATV is switched OFF again.
On the day of the launch, tomorrow, 5 June, ATV is moved to the launch pad.
Planned timings
Lift off (H0) – 21:51:11 GMT
Separation – 22:56:04 GMT
Many people think this is the end of our work – but it is actually the beginning! ATV is passive during launch; so for one hour we sit and watch blank screens, waiting for separation and hoping for the best. Four minutes before separation, we start getting telemetry and this tells us how well ATV has weathered the launch (we can not send any commands yet).
As soon as ATV has separated, there are a number of things that need to be done:
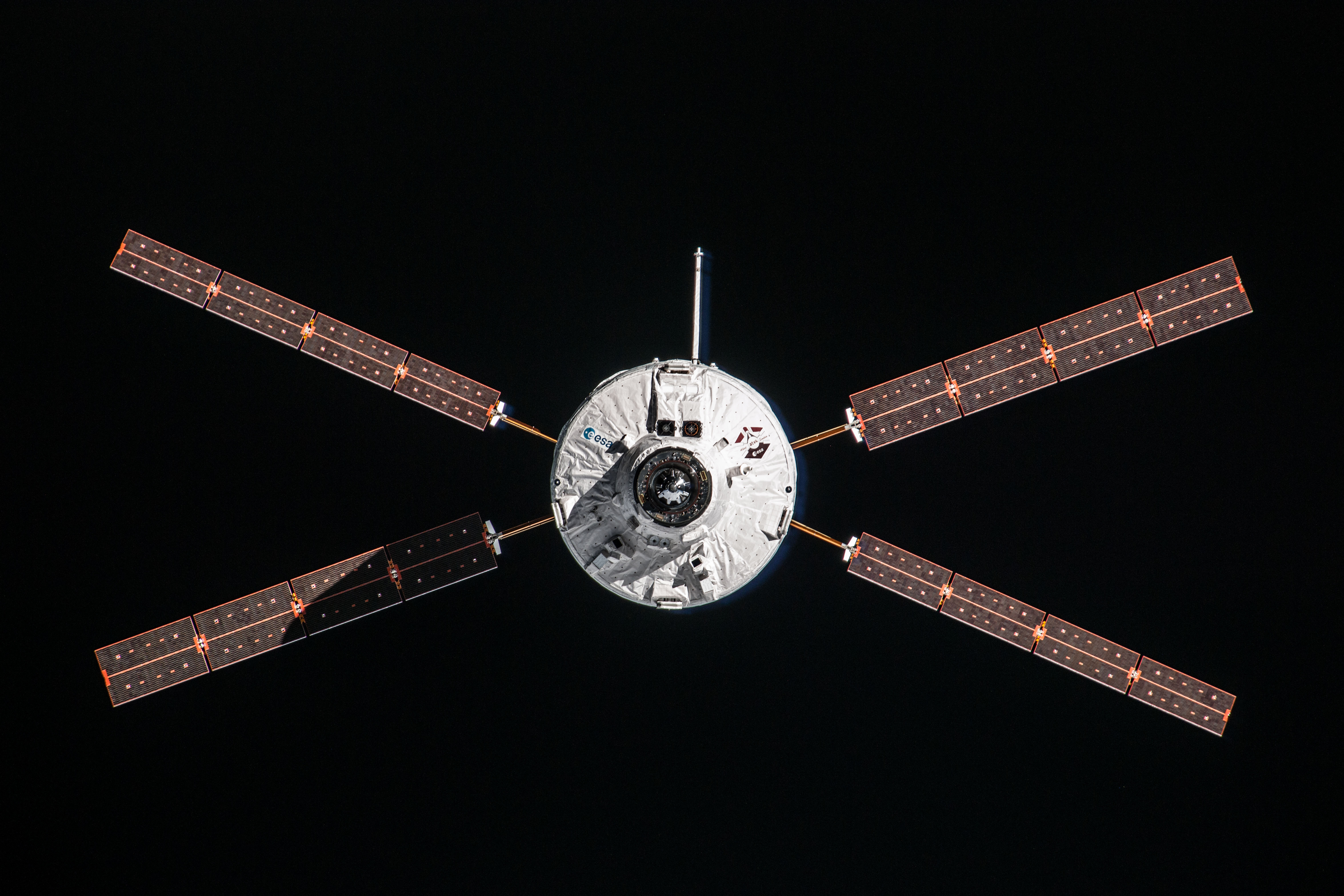
- The four solar arrays need to be deployed
- The antenna boom used for direct proximity communication with the ISS must be deployed
- The GPS receivers have to be started up (and locate the required number of satellites so that we know where we are)
For the first few days, ATV will coast in orbit waiting for the calculated time when it must start to ‘phase’ (synchronize) its orbit to that of the ISS (now at about 415 km – Ed).
Around 10 June, the first set of boosts take place (called transfer to phasing orbit). Then:
- 11 June: The Progress vehicle currently occupying ‘our’ docking port will leave. Camera images during departure might give some indication of the status of the MRR sensor, used by ATV during rendezvous (RDV).
- 11 June: ATV will test its collision avoidance maneuver by triggering a very small boost using the dedicated computer. This demonstrates that we can safely approach the ISS.
- 12 June: The flight dynamics team calculates some mid-course corrections (boosts)
- 13 June: We extend the docking probe
- 14 June: A series of boosts bring ATV to the proper starting point required to set up the rendezvous on 15 June
- 15 June: ATV-CC pilots ATV to a point 30 km behind the station
At this point, the proximity communication link with the ISS is activated and ATV starts receiving the GPS data seen by ISS receivers. The computer will then do a differential GPS calculation to determine the relative distance between itself and the ISS. When the signals are stable and a number of other criteria are satisfied, the controllers will give the OK to start the rendezvous.
Automated docking: what ATV does best
From this point on, ATV pilots itself. It will stop at selected hold points, giving ground controllers in Toulouse, Moscow and Houston the chance to check parameters. ATV will only continue if it receives a GO. Ground control and the ISS crew have a few different options for stopping the rendezvous if anything goes awry.
Docking is planned at 13:46:01 GMT (15:46 CEST) – a reasonable time! (ATV-3 docked at 22:34 GMT…)
Time permitting, more updates will follow…
— Charlotte
PS: Don’t miss the Arianespace webcast: https://www.arianespace.tv/
 Automated Transfer Vehicle page
Automated Transfer Vehicle page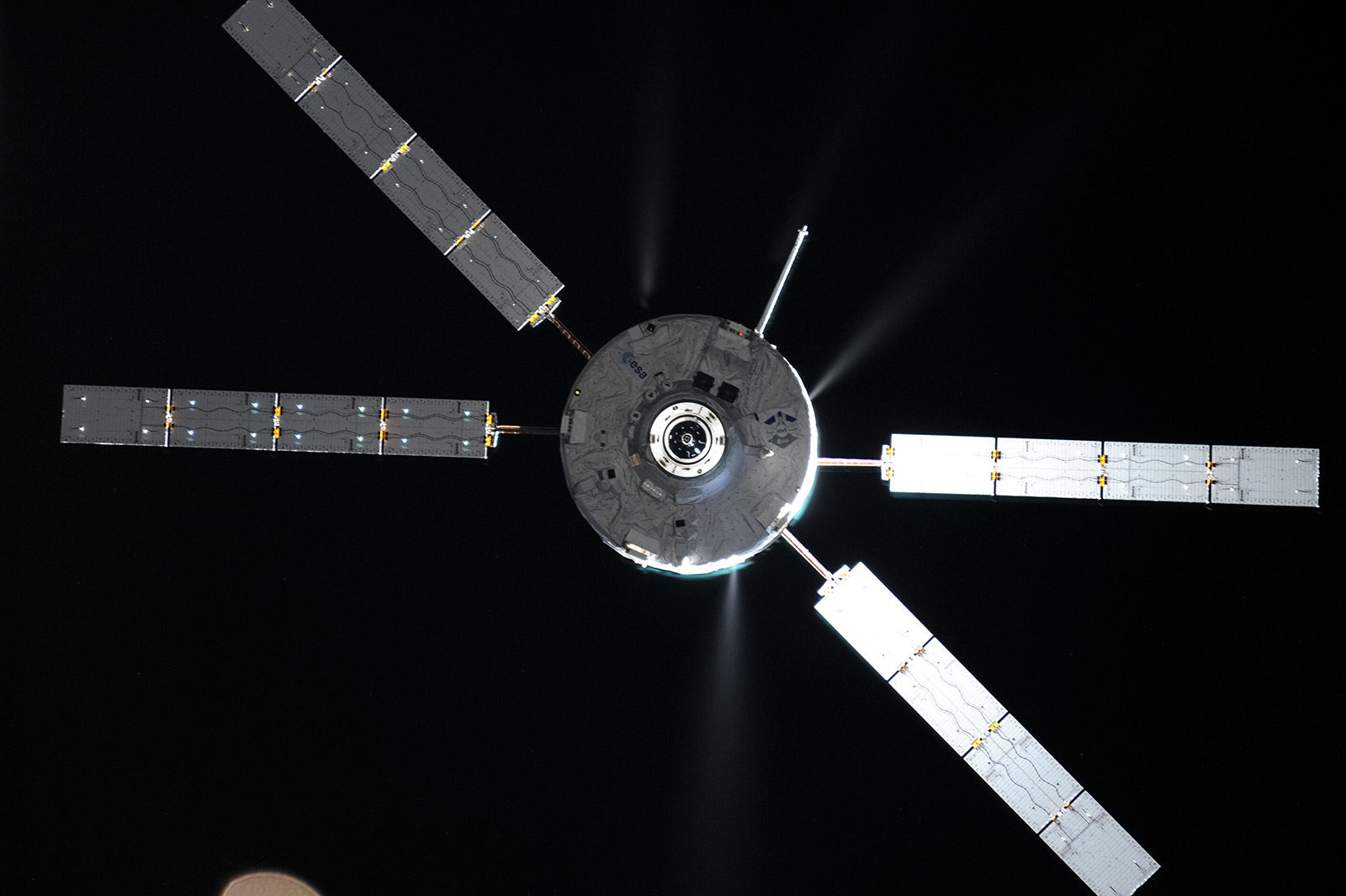 ATV blog archive
ATV blog archive
Discussion: no comments