UPDATE 24 FEB 11:50 CET – a new time line (reduced) based on the updated docking time – now 16:49 CET – is available here.
The three graphics below provide an overall view of what’s going to happen as ATV moves up to Station for docking tomorrow. The images show what happens at each of a series of ‘waypoints’ – basically, check points in space that ATV steps through, getting progressively closer to the final point of contact (Note: timings shown in these images have been slightly updated for actual docking on 24 Feb).

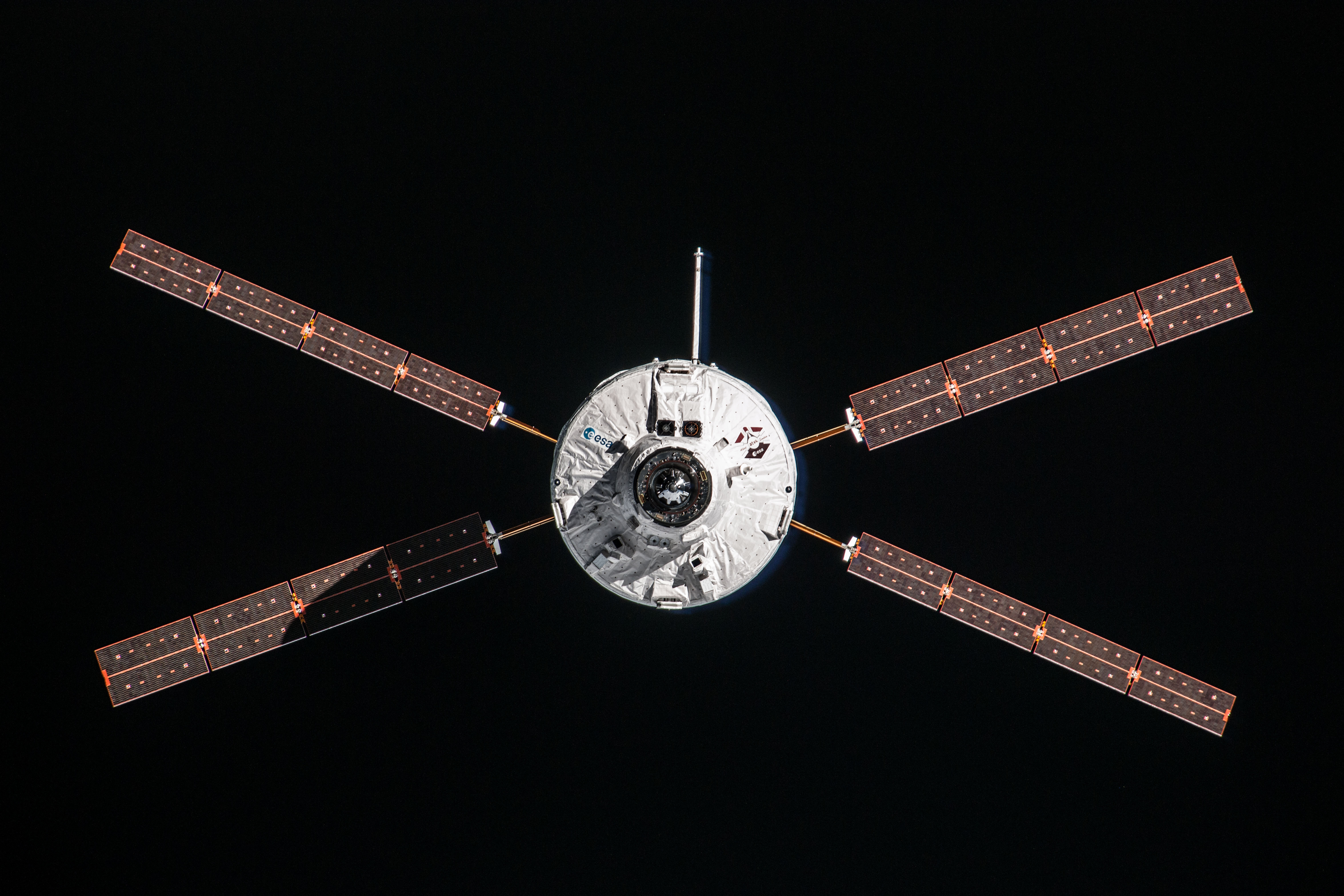
ATV Rendezvous with ISS
The action begins when ATV reaches Waypoint S-1/2 – a ‘box’ in space located 39km (+/- 3km) behind and 5 km (+/- 500m) below the ISS – ATV must be in the S-1/2 box in order to start the automated rendezvous & docking, and, after arrival planned for 12:38 CET, it hangs here for a bit in a sort of ‘wait mode’. Until now, ATV uses absolute GPS navigation – fixing its location from signals received from GPS satellites.
Once given the go, ATV moves under its thrusters progressively through the S0 and S1 Waypoints; S1 is around 30km behind and 5km below the ISS. In this phase, relative GPS navigation begins, where ATV locates itself by comparing data collected by GPS receivers both on the ATV and the ISS. Also, ATV’s proximity radio link becomes active, and the vessel can send data directly to the Station.

ATV Docking
At S1 – 15.5 km behind and 5 km below the ISS – ATV goes into ‘homing’ – at this stage, ATV moves through a series of 4 thruster burns to the S2 Waypoint, 3.5 km from the ISS (set for 14:42 CET). At S2, the external lights are activated. The Russian ‘Kurs’ radar-based imaging system is activated and the ISS crew can begin monitoring this data on their screens.
ATV then moves progressively through Waypoints S3, S4, and S41; at S3 – 249m behind Station – the videometer and telegoniometer (laser-pulsed instruments that calculate the distance and orientation to the ISS) are activated. The videometer is used as the prime sensor for navigation. Mission controllers will assess progress and give a ‘Go’ for final approach at each waypoint. The speed of ATV with respect to the ISS slows from about 40 cm/second to 7 cm/second. S41 – 11m behind Station – will be reached at about 16:40 CET.

ATV Docking: What the crew sees
ATV proceeds to final docking and capture over the final 11m from S41 to contact. The crew monitors progress closely, and can issue commands to stop, hold, abort or escape at any sign of trouble.
 Automated Transfer Vehicle page
Automated Transfer Vehicle page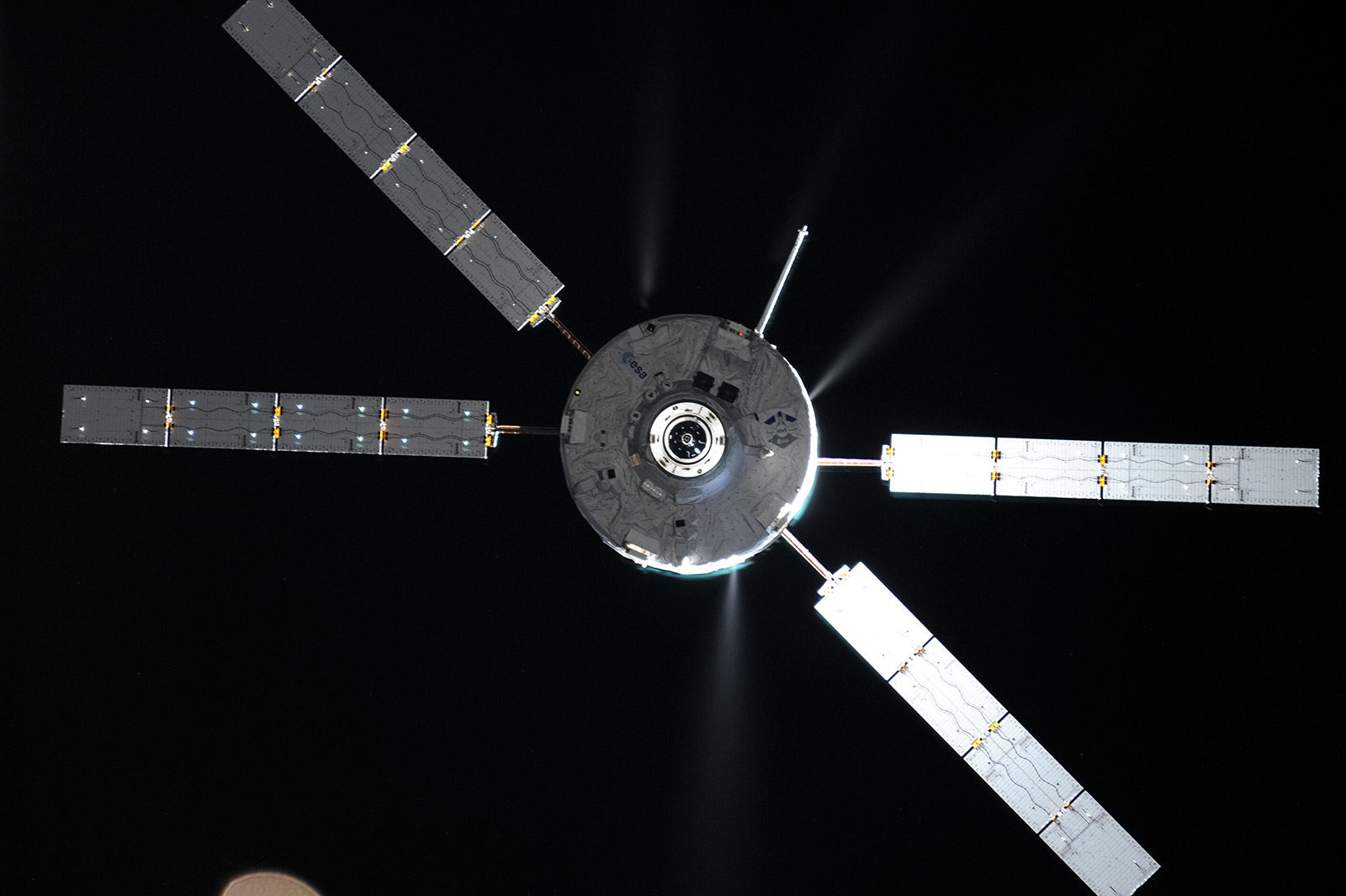 ATV blog archive
ATV blog archive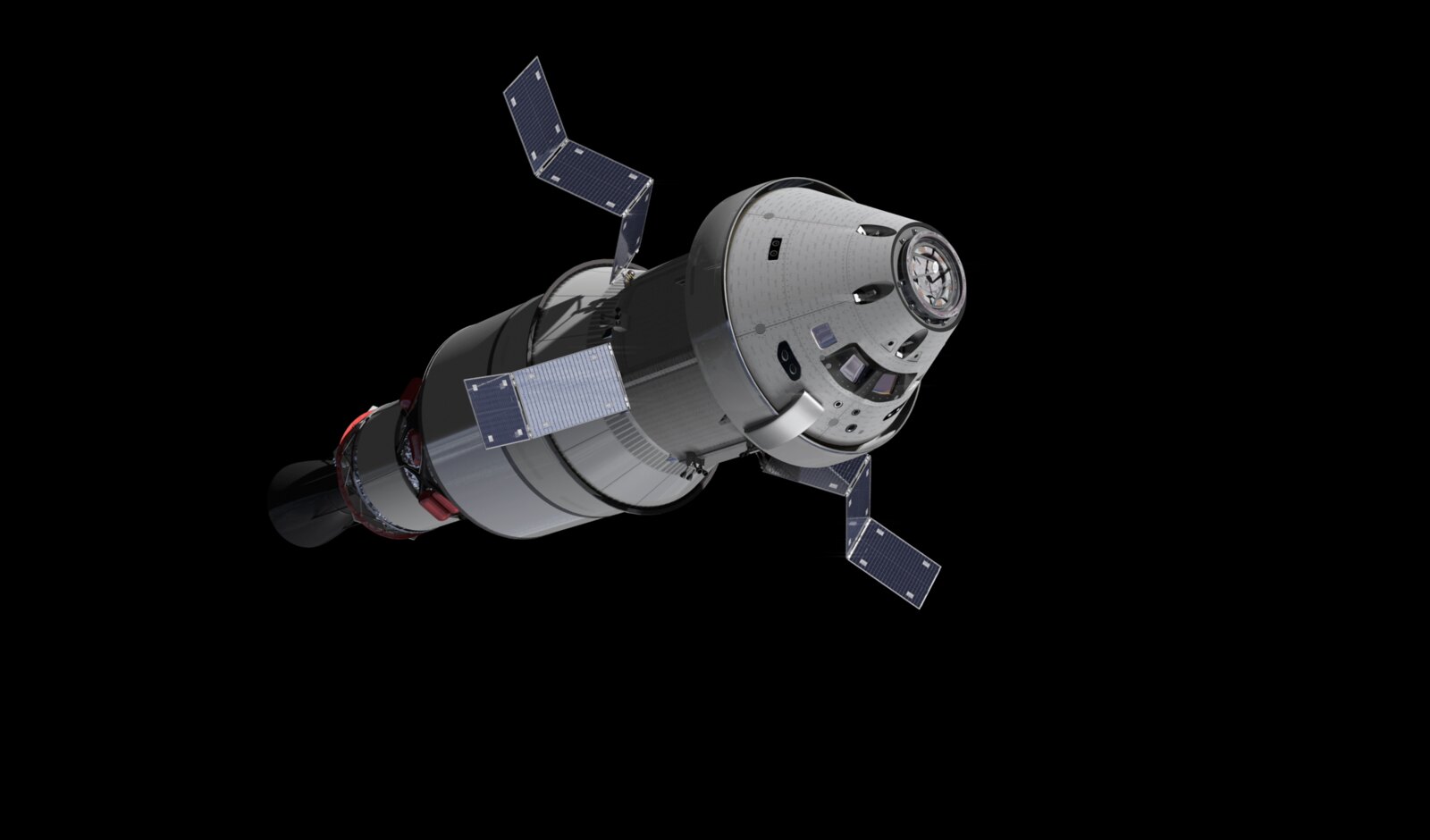
Discussion: no comments