This just in from ESA’s astronaut Paolo Nespoli on board the ISS: a photo showing @Astro_Paolo and his colleague Aleksandr Kaleri training for the docking of ATV Johannes Kepler on 24 February. Paolo writes: “Ci stiamo preparando per l’ATV” (scroll down for a caption from ESA’s Lionel Ferra, the ATV docking training expert at the European Astronaut Centre and see our earlier post ISS astros conduct ATV docking drills).

Credit: ESA/NASA
Lionel writes:
During the simulation shown in this photo (the dynamic one), we used a simulator developed by RSCE Energia to mimic ATV dynamical behaviour on board the ISS. We instructed the crew to run through various scenarios as explained in a radiogram. The image size of the simulator, contrast, shadow, night/day, etc., are representative of various ATV visual monitoring conditions. The main idea is that the crew uses the real operational tools, among them, the plastic ‘range rulers’ seen in this photo, which are designed to assess the distance of ATV from the ISS during docking by measuring the vessel’s apparent size (or the target size) and then reading off the distance or range from the scale on the ruler. This is the baseline for ATV crew operation: an independent level of safety by using dissimilar means or sensors.
As the simulator has been calibrated to the actual size of ATV, Paolo measures the distance like it would be in real operations using the Russian laptop on which we ran the simulation. Paolo and Alexandr are also holding the world-famous ‘ATV Crew Malfunctions Table’, which is going to be the prime on-board reference documentation for immediate reactions to any malfunctions from the S3 docking waypoint and onwards.
At the time this photo was taken, Paolo and Alexandr were talking to Oleg Polovnikov and myself on console in MCC-M (TsUP) playing the role of ‘Glavni Operator’ (Главный Oператор, which is Capcom) and instructor at the same time. Regards from EAC Cologne – Lionel
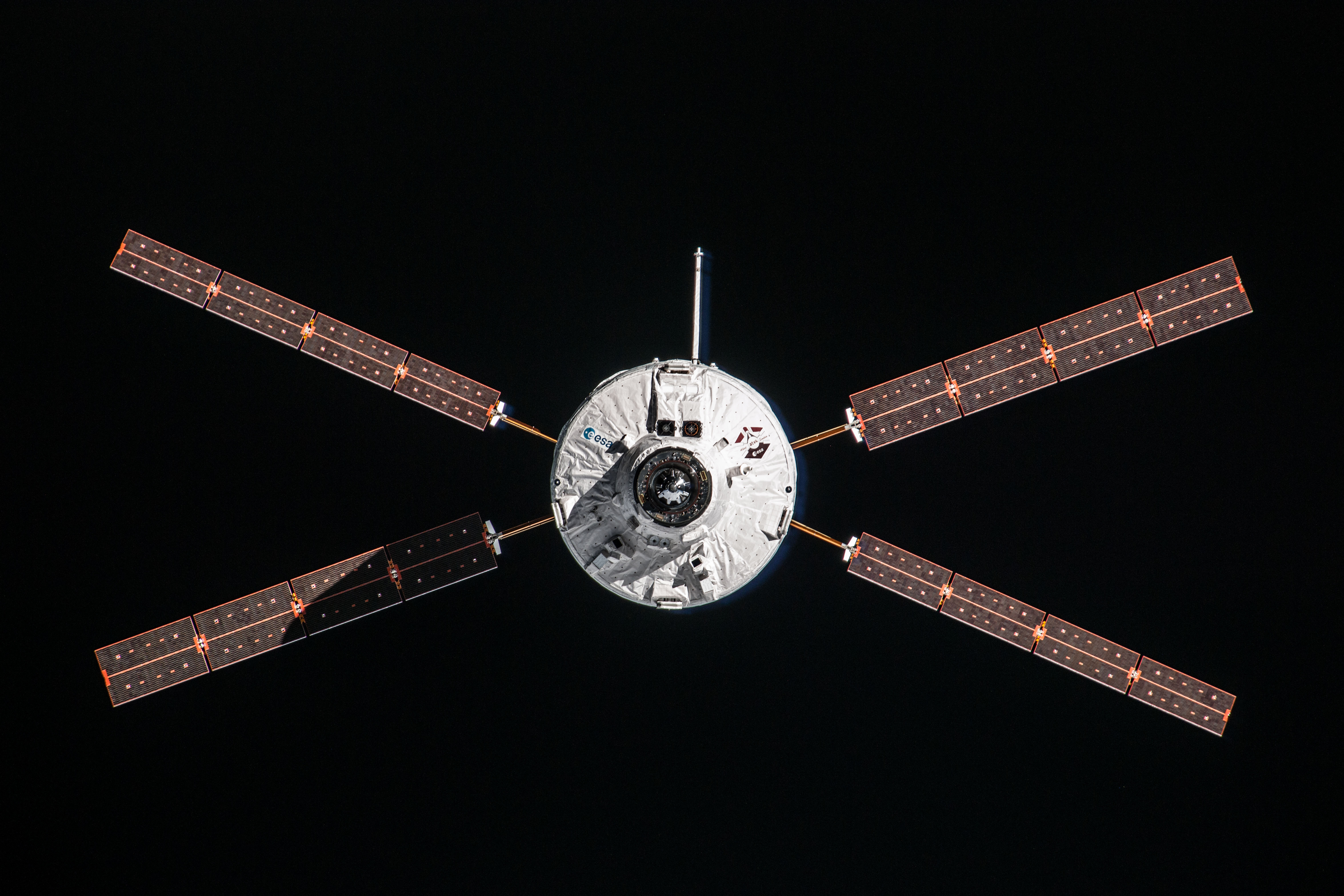 Automated Transfer Vehicle page
Automated Transfer Vehicle page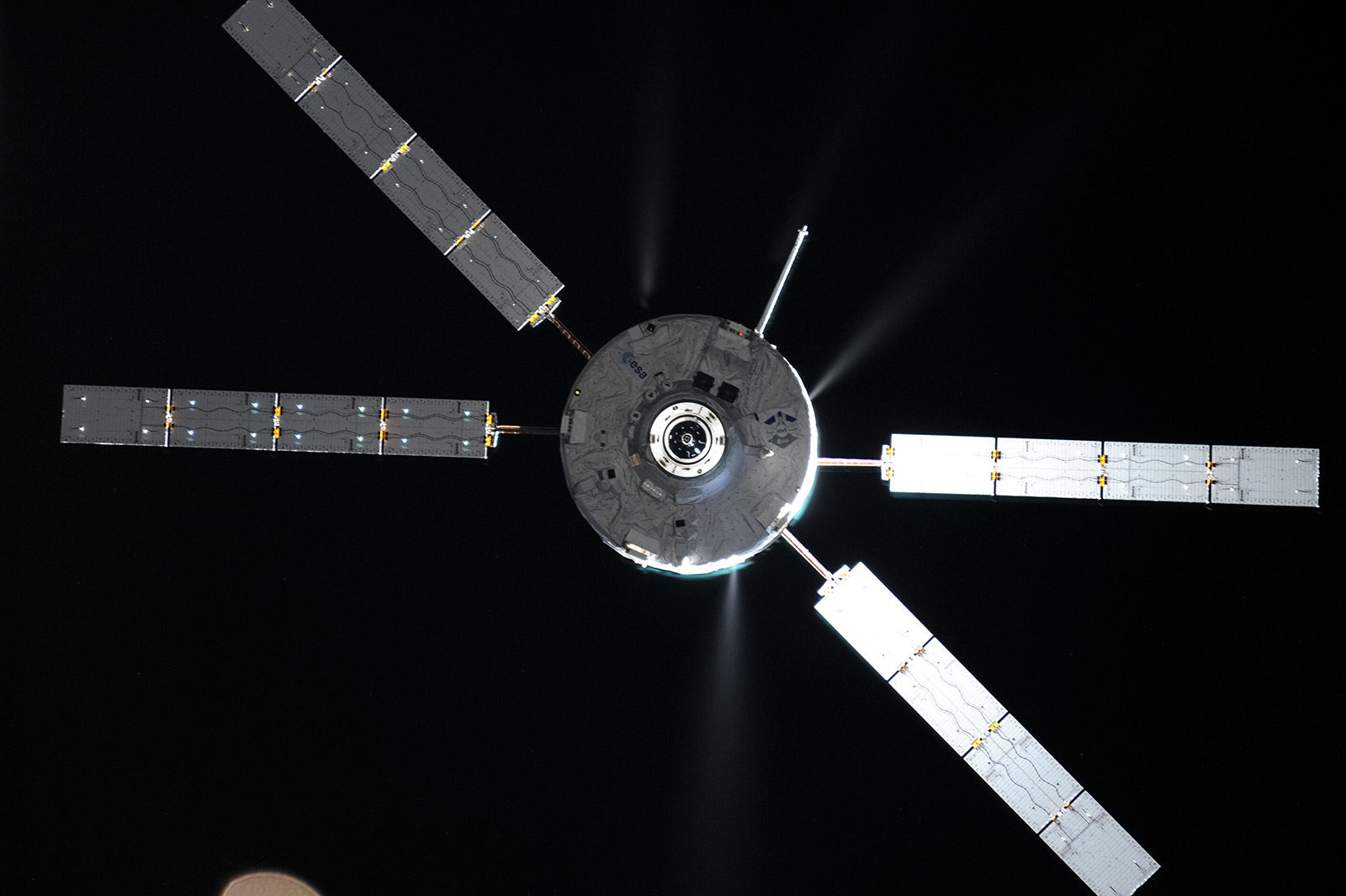 ATV blog archive
ATV blog archive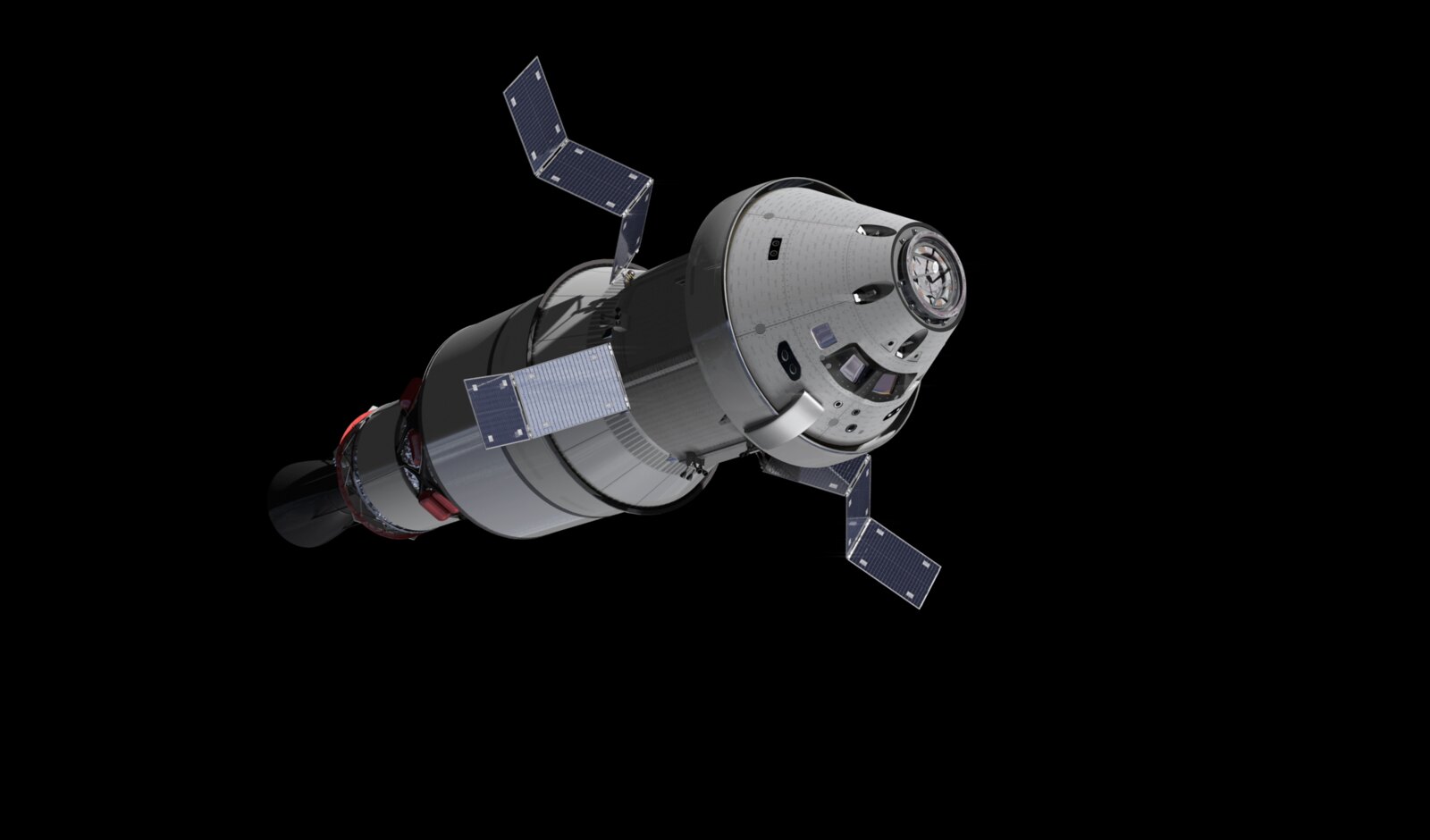
 NASA Orion page
NASA Orion page Airbus Orion page
Airbus Orion page
Discussion: one comment
Based on predictions at spaceflight.nasa.gov, I expected to see both the ATV and space station tonight with the naked eye (north of Seattle, WA, USA) prior to docking, but saw only one object. Perhaps this is because the ATV is not very reflective relative to the ISS?