
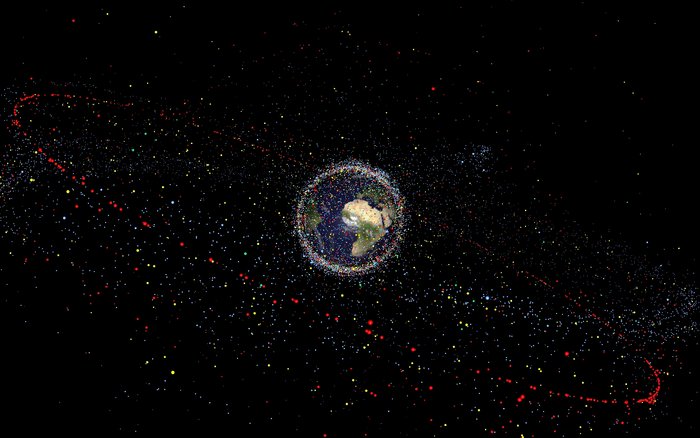
During the Design for Removal Workshop, held on the 10th of October as part of the Clean Space Days 2024, industry, academy and space agencies came together to address the challenges in ensuring spacecraft can be safely and efficiently removed from orbit at the end of their mission lifespans. As a core pillar of the Zero Debris (ZD) approach, Design for Removal is essential to mitigating the growing threat of space debris, while enabling the safe, reliable removal of defunct satellites from orbit.
This workshop marked the successful completion of Phase 1 and launched Phase 2 of the initiative, building upon Phase 1 for the development of a Standardized De-orbit Interface for satcom-class spacecraft.
Phase 1: Achievements and Industry Insights
In Phase 1, ESA worked closely with stakeholders to gather input through surveys and interactive discussions. The feedback highlighted a clear need for standardization, especially for capture interfaces and navigation aids for rendezvous. Key aspects like attitude reconstruction, detumbling and capturing features were identified as essential for making deorbiting feasible for telecom-class satellites and other spacecraft.
Phase 2: Moving Towards Standardization
Phase 2 of the initiative aims to refine the Standardized De-orbit Interface Definition and tackle the technical challenges raised during Phase 1. This includes addressing specific use cases and needs identified by stakeholders, ensuring the interface design is adaptable across a variety of satellite sizes in LEO and GEO.
In the workshop, Marco Papa and Rui Gondar, ESA Clean Space System Engineers, along with Sara Sanchis Climent, ESA Clean Space intern, outlined the technical difficulties identified in Phase 1 and emphasized the importance of collaboration with industry to streamline the standardization process. One of the central goals of Phase 2 is to standardize satellite interfaces, including:
- Capture interfaces for deorbiting, enabling safe removal of defunct satellites without contact, while supporting the loads during capture and re-entry.
- Navigation aids for rendezvous and close-proximity operations to support GNC systems.
- Detumbling features to stabilize spacecraft during capture.
- Attitude determination aids to help reconstruct spacecraft orientation from the ground.
Key Discussion Points from the Workshop
Several themes emerged from the workshop, reflecting the diverse range of inputs from stakeholders:
- Capture ConOps development: The entire servicer-client operation drives the design of the interface, so a concept of operations should be developed first before standardizing interfaces.
- Standardized Interfaces: The development of a non-hardware standard for deorbiting interfaces remains a top priority. The interface is intended to enable in-orbit satellite-to-satellite latching for end-of-life removal.
- Cost and Scalability: Stakeholders raised concerns about the cost and scalability of the proposed standards. It was stressed that the standard must account for cost, satellite design impact, and deployment time, ensuring that it is applicable to a wide range of missions.
- Relationship between GNC and Mechanical Interface: One of the key challenges is ensuring a smooth relationship between GNC and the capture mechanism. Open points in this area include capture before contact, alignment, and AIT constraints. This relationship is critical to ensuring a successful capture and deorbit operation.
- Navigation and Relative Autonomy: It was highlighted the importance of navigation aids for rendezvous, with points such as proven sensor diversity, ability to operate in eclipse, and complete autonomy being emphasized. These features will be crucial for the future of autonomous spacecraft operations.
Study Cases and Phase 2 Roadmap
Three use cases were presented during the workshop, each focusing on a different type of satellite platform from small platforms (50-500 kg) in LEO to large ones (>500 kg) in LEO and GEO, using active grappling and berthing mechanisms. Each of these cases emphasized the importance of developing mechanical capture interfaces, navigation aids, detumbling capabilities, and attitude reconstruction features from the ground.
ESA will release a draft of the De-orbit Interface Standard on November 22nd, 2024. All stakeholders receiving the draft will be considered co-developers and are expected to provide their feedback by January 27, 2025. As a co-developer, you commit to contribute to the standard’s evolution. Join here the Standardised De-Orbit Interface community to receive the draft and collaborate with us to finalise it.
Please note: The deadline for registration to become a co-developer of the Standardised De-orbit Interface has been extended to December 2nd, 2024.
A workshop on January 30th, 2025 will be held to discuss the feedback received, exclusively open to registered co-developers. Following these discussions, ESA will host a final presentation on February 5th, open to the broader community, to share consolidated results from Phase 2.
Conclusion: Looking Ahead to the Future of D4R
The D4R Workshop provided valuable insights into the challenges and opportunities of creating standardized solutions for satellite deorbiting. With a high level of participation and interest from stakeholders, the process of defining and refining these standards is underway. Looking forward, Phase 3 will focus on prototyping and finalizing the standards for capture and navigation interfaces, while Phase 4 will aim to verify these designs and establish a solid framework for the future of D4R in the space industry. This collective effort will ensure that ESA’s goal of Zero Debris by 2030 becomes a reality, setting a global standard for sustainable space operations.
Your active participation and feedback will help shaping a sustainable space environment, and we invite you to join the ongoing dialogue within the Standardised De-Orbit Interface community.
RELATED CONTENT
- Join our community here: the Standardised De-Orbit Interface community
- Learn more about the Zero Debris (ZD) approach
- Find out more about the Clean Space Days 2024
- Watch the Webinar | Standardised De-orbit Interface Definition for Satcom-class Spacecraft
Discussion: no comments