
ESA is designing Radio Frequency tags to ease the removal of items of space debris, helping to ensure that it is safely removed from orbit.
The main challenge of the kind of close proximity operations required for debris capture is to estimate accurately the relative distance, velocity, spin rate and pose of the target.
Sensors can be used to measure these parameters. For example, LIght Detection And Ranging, LIDAR systems have a pulsed laser beam scanning targets and measuring the time it takes for the light to bounce back. The wavelength of light is so much shorter than that of radio waves that such ‘laser radar’ gives much more precise measurements. However they are highly power demanding and power is a scarce resource in space. In this context, ESA is studying additional systems to help the relative navigation of a chaser toward a target, such as passive Radio Frequency (RF) tags.
This study, led by the Italian company Leonardo, aimed to study the feasibility and benefits of embedding passive RF tags on future European LEO platforms to support the rendezvous phases: when approaching a target, the chaser “interrogates” the target’s passive tags and deducts the navigation parameters (distance, pose, etc.) from the returned signal.
Representation of the antenna on the chaser and Radio Frequency tags on target
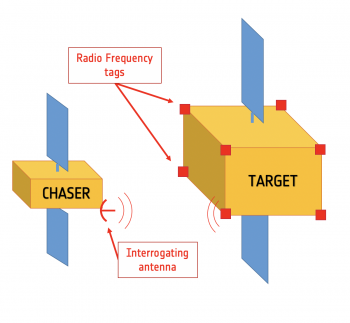
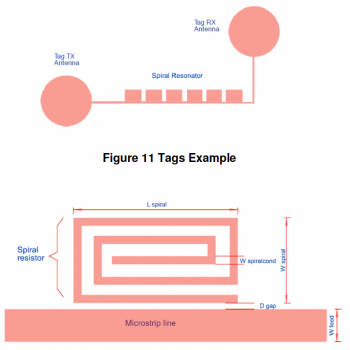
On the target side, RF tags are placed in different locations of the platform. The signal sent by the chaser’s antenna is received by the tag, modified through resonators, and sent back to the chaser’s antennas.
“These elements have the great advantage of being chip less, robust, reliable and fully passive, which are essential characteristics for devices meant to be used at the satellite’s end-of-life, and therefore being exposed to harsh space environment for a particularly long period of time” explains Sébastien Perrault, CleanSpace Young Graduate Trainee. “Besides, the relatively small impact and cost expected of the tags on the future platform makes this technology particularly attractive while significantly helping relative navigation.”
Resonators example
On the chaser side, a set of transmitter and receiver antennas ‘interrogates’ the different tags, and extracts from the backscattered signal the parameters necessary for relative navigation.
Sensor electronics architecture on the chaser side
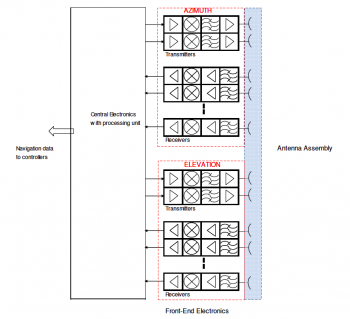
The sensor measures azimuth and elevation of each tags visible on the target and, then, can deduct the pose of the target. A complementary method uses the directional properties of the tags, and measures the tags’ power level with respect to their relative distance and orientation. The combination of those approaches has shown to measure accurately relative distance and pose estimation at close range.
Typical radiation pattern of tags


This system has shown promising results, and could be a viable option for improving relative navigation in the frame of future missions requiring close proximity operations. Active Debris Removal and In-Orbit Servicing missions would clearly benefit from the development of these technologies.
Discussion: no comments