
ESA is opening an Invitation to Tender to further develop key robotic technology elements that could fly both on Active Debris Removal mission and on Space Servicing Vehicles.
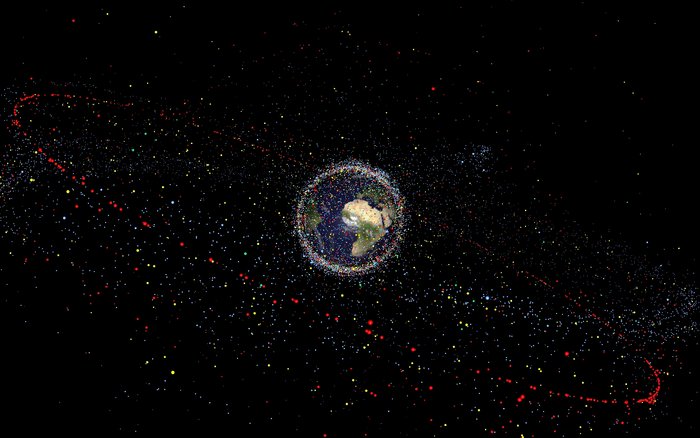
Since 2013, ESA has been working on the e.Deorbit mission, where the goal is to “Remove a single large ESA-owned Space Debris from the LEO protected zone”. The Active Debris Removal (ADR) mission consists of a satellite (chaser) that is launched by a small or medium launcher, performs a rendezvous with the ESA-owned debris (target), captures via robotic means and removes the target from the LEO protected zone.
In parallel to e.Deorbit, European industry has been working on the concept of Space Servicing Vehicles (SSVs, otherwise known as Space Tugs); a spacecraft capable of offering on-orbit services such as:
- On-orbit servicing: Travelling from one spacecraft from another to provide fuel, replace a battery or fix a solar panel
- Tugging of spacecraft from one region to another: For instance, from low earth orbit to the geostationary orbit, or from Earth orbit to a lunar orbit
- In-orbit assembly: Placing several parts of a system together, such as attaching an antenna onto a spacecraft in-orbit
In 2017, ESA conducted a Pre-Phase A study in ESA’s Concurrent Design Facility (CDF) on the Space Servicing Vehicle in support of European Industry. Three mission scenarios were analyzed:
- Deep Space Gateway (DSG) Tug: To move a payload module (>5 tons) from LEO to a near-rectilinear orbit and rendezvous and dock with the DSG.
- GEO Antenna Assembly: To rendezvous and dock with a GEO s/c, than attach large solid antenna modules.
- Mega constellation ADR: To remove the non-operational satellites from a mega constellation system.
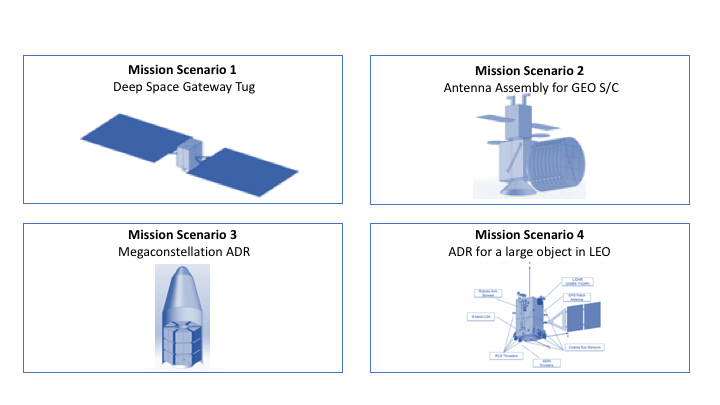
Mission Scenarii of Space Servicing Vehicle
The RENEGaDE – Robotic Elements for Servicing and Debris Removal – activity will focus on advancing key elements of robotic manipulator technologies for the following on-orbit servicing and debris removal scenarios:
- Uncooperative and unprepared large debris removal (e.g. e.Deorbit)
- Uncooperative prepared small debris removal (e.g. Mega constellation Active Debris Removal)
- Cooperative prepared servicing (e.g. ASSIST)
- Cooperative unprepared servicing (e.g. refueling of existing Telecom satellite in GEO)
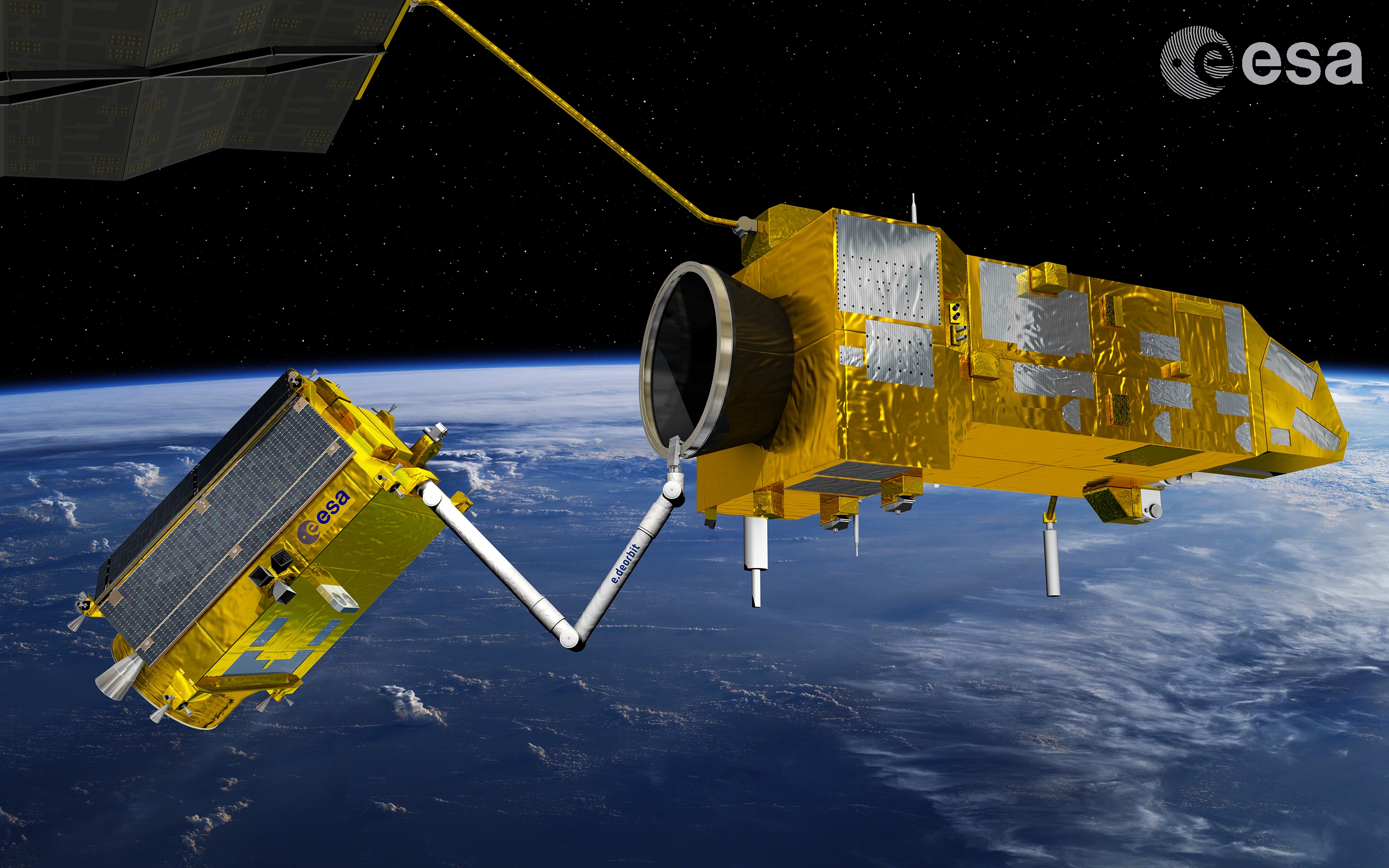
e.Deorbit clamping the target
On the 28th of May, ESA issued a 6 M€ Invitation to Tender to develop elements of the robotic arm required to perform the above missions. The activity will run over 1-2 years, and will focus on the elements such as the joints, controllers, interface mechanisms, tool stowage and exchange system, together with the associated test facilities required verify and validate the equipment.
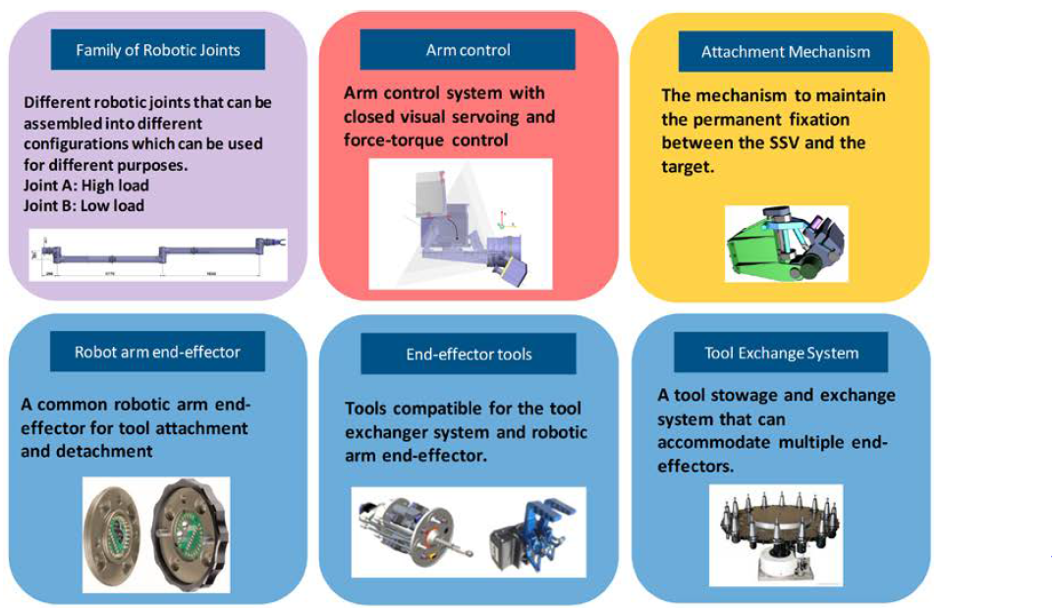
Robotic Subsystem Building Block Elements
Note that the ITT’s closing date is July, 11th.
Related content:
Discussion: no comments