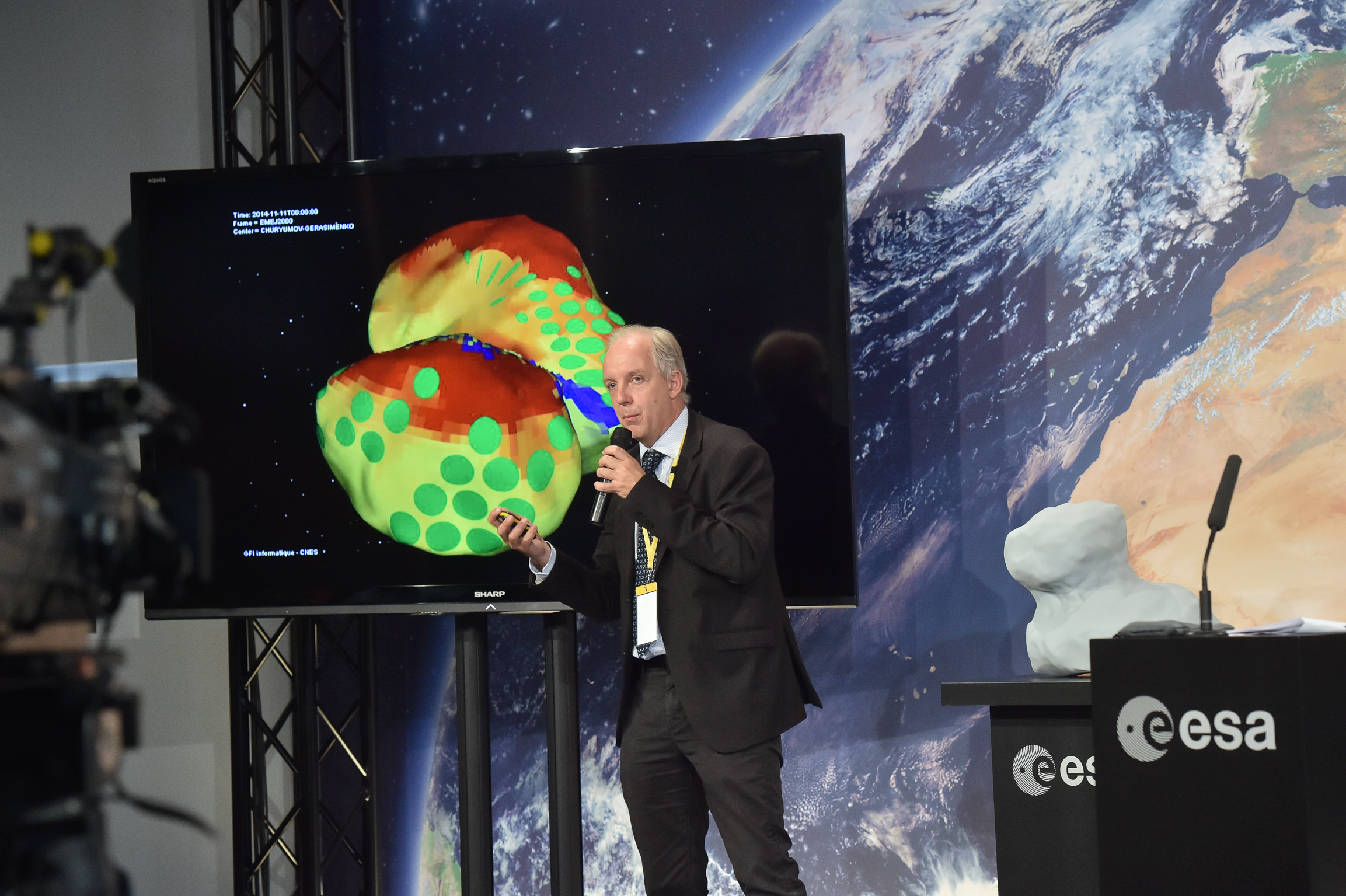
Stefan Ulamec showing a colour-coded shape model of the comet. Credit: ESA/J.Mai
As the latest images from OSIRIS make clear, choosing a landing site for Philae will not be easy. In the afternoon session of the Rosetta rendezvous event at ESOC today, Stefan Ulamec, Philae Lander Manager from DLR, talked about some of the challenges that will be facing the team.
One challenge will be landing in low gravity. This was tested at the Max Planck Institute in Katlenburg-Lindau before launch.
Later, tests were carried out at the Landing and Mobility Test Facility (LAMA) of DLR in Bremen, where landing in sandy conditions and on different slopes could be assessed using the qualification model of the Philae lander.
Another fear when the lander was being designed was that it would rebound from the surface – but this was when they still thought the surface would be very hard. Indications now are that surface appears to be soft so Ulamec thinks that rebounding won’t be such an issue. We’ll soon find out what the surface is made of, but in any case, the lander is equipped with a harpoon system and ice screws to secure it to the surface. In addition, the touchdown will be at a speed of just 1 m/s – Ulamec described: “this is like walking and bouncing against a wall; it hurts but it won’t kill you!”
But what about the surprising comet shape? Not the standard ‘potato’ that everyone was expecting – more like two potatoes stuck together, or even a duck. Already, there has been a very preliminary analysis carried out at CNES showing some potentially interesting sites based on the illumination conditions and flight dynamic restrictions.
But now it’s time to start the process for real: the landing site selection group will meet for their first full meeting 22-24 August, at which stage they will select a maximum of 5 candidate landing sites.
Watch Stefan Ulamec’s presentation in the replay of the afternoon session here.




Discussion: 26 comments
This is an example of one of the “niceties” of living in our current Technology abundant world. This is what science fiction was made of back when I was a child. I will be back often to watch progress.
well stated. last year’s sci fi story is today’s headline news.
Yes and no. Even the great oracles like Arthur Clarke expected these missions to be manned by now.
I vote for the duck bill !
It has variable soil types, is protected from the chunks coming from the neck. It would allow easy backlit spectro, and has the best transmission visibility in the neck area.
Also has good lighting, and the cliff next to it appears to go into shadow while the rest of the shelf is still in sunlight. Would be nice to see sublimation there….
Not a lot of boulders, but appears to have differential , if not layered, topography.
Congratulations ESA and well done. What an accomplishment. More images please, give us more. Thank you.
I would not pick a landing site on the “head” or “neck” area, I would think there was a risk that when the comet approaches perihelion, there is a risk of the head detaching as the coma and tail build up. I would pick a vantage point where there is the best chance of a good view of proceedings (although the coma may significantly impede visibility)
Interesting discussion from almost 10 years ago:
https://metaresearch.org/solar%20system/eph/DeepImpact.asp.
That site also has two follow-up papers linked here: https://metaresearch.org/solar%20system/solar.asp
Surely the distance of the horizon from the Lander must be a maximum? Frustrating if Philae can’t see “Old Faithful” because its round t’other side.
They’re going to have to come in pretty low to land, but coming in low is part of every textbook landing.
Amazing feat of science, engineering, and imagination! The leap in understanding we are about to experience is the stuff of dreams. cheers!
The team is a credit to science and the human race as a whole. For the first time in human history, we’re on the cusp of landing on an asteroid.
Keep science and space exploration alive people. Without it, our species has little to no chance to live beyond our solar system, and the inevitable nova that will wipe our planet clean.
Until the coverage of Wake Up Rosetta, to a lay person (me), this was just another metal box shot into space. But that got the nibble. Since then I’m just awed by the capabilities of the human imagination and am hooked. Talk about thinking outside the box.
Talking about a new frontier of space exploration and a new step in humankind, we should also seriously consider how humanity is, in many places on Earth, destroying lives in stupid and brutal manners… It always has been fascinating how homo sapiens sapiens is running towards a better knowledge of our universe with fantastic steps of technology ahead and at the same time is going backwards because of stupid behaviours. Look at the news and see how Rosetta success shares the lines with other sickening infos coming from planet Earth simultaneously… Only hope this kind of human behaviour will not be exported one day to alien worlds! Yes, the capabilities of the human imagination is tremendous, whatever the direction is taken… Sorry, that was my reflexion of the day. Wish a good day to Rosetta and Philae and the teams behind the intelligence of these marvelous robots. At least some happy news coming from our Solar System!
A stunning achievement by ESA. I’m absolutely thrilled for you guys that this has come off so well. Congratulations to all concerned and best wishes for the rest of the mission!
Did I understand it right that the accuracy of the landing place is 1 square kilometer?
Landing on the long side of the comet close to the center would reduce it’s swing momentum.
Now that I can see what the surface of a real comet looks like some movies have been ruined. Hollywood is overrated anyway. Great Job team.
Perhaps in the future we will capture an asteroid and use that to traverse the solar system while mining it’s interior to extract oxygen and other vital ingredients for life. Better than being stuck in a tiny tin can for years.
Awesome job guys.
Science Geeks are definitely the new Cool Kids.
Seeing what the ESA teams are achieving gives some impression of what those observing the first moon landing must have felt.
And the relevance to everyone on Earth of the answers they can find to lots of ‘origin’ questions is quiet remarkable.
Very good… carry on!
So exciting. The European scientists have really hit the jackpot with this comet. A 10 out of 10 so diverse and intriguing. And to think this is just the NAVCAM images and from 10 times more distant than it will get over the coming weeks. The OSIRIS camera will begin to give much higher quality as it starts to map the entire surface in enormous detail over the next weeks and months.
And the 12 large high quality instruments on Rosetta and the 10 instruments on the Philea lander are just going to provide a treasure trove of new information. I hope the tail developments will also become significant as it gets closer and moves around the sun (relatively speaking).
Just imagine seeing plumes come out up close in HD. Wow. Even possible seeing it from the surface if the philea probe can land. Really wonderful ESA mission. Lets hope the EU further succeeds in their plan of scaling up ESA to include all EU members and than expanding it further by brining it under full EU leadership and much larger budgets starting perhaps as early as 2020-2025.
ESA should continue to expand to the level of NASA (or beyond) as many EU leaders want. But this is not the cold war where budgets of the US and Russia suddenly could explode and remain relatively large ever since. With ESA the budgets have to be justified so growth can only come from ever greater mission achievements. Giving politicians also the weapons to defend these investments back home. First European cooperations as CERN, AIRBUS, ESO, etc.have opened up the way. Missions like this do it for ESA as well.
So many agencies and cooperations in Europe being build up from those first success. Large new first time robotics coop, Epic World class new material research facilities being build, World class brain research programs, Top Fusion, Top L,aser research, etc, etc so much coming online over the coming 5 years in Europe. Just wonderful for far more science, innovations and for more discoveries from European countries in the future.
Lets just hope Russia does not cause to much trouble over the coming years though. This Russian upheaval might effect the new ESA 2016 mars satellite and test lander and the 2018 ESA mars drilling rover in a very big way. Or the international space station operations.
Desde enero de este año en que me enteré de de Rosseta estoy siguiendo la secuencia de tan extraordinaria y apasionante misión espacial.
Esperemos el éxito total de lamisión
I remember the head of flight dynamics Frank Dreger saying that the curvature of the legs of the triangular flight path Rosetta is in now will be used for better and better estimates of the comet’s mass. An accurate estimate of the mass is necessary for the later orbit insertion and Philae landing calculations.
I was wondering how you get at the curvature. Is it through imaging (NAVCAM and OSIRIS) by inferring distance from the scale of the comet and comet objects and the known optics parameters, or are other methods used?
@ Robert:
The imaging is used for a 3D model of both the comet and the relative trajectory. Stars in the images yield the orientation in space. The focal length yields a rough scale of the model. A precise scale is derived from the Doppler shift in the communicatin link.
I am not an insider. Just my ideas how I would do it:
I’m really enjoying this blog and the great comments. What a stunning achievement, this mission. I agree with a previous poster, they struck the jackpot with this comet, a 10 out of 10!
Why would anybody decide on flimsy wings of solar panels for a mission to a very windy comet? Why not nuclear power like the Voyagers? It will never work, surely. If it does, I’ll eat my car.
“For the first time in human history, we’re on the cusp of landing on an asteroid.” Well to be precise it’ll be the first time of landing on a comet’s nucleus – NASA’s Near Shoemaker (although not designed as a lander)descended to the surface of asteroid 433 Eros in 2000, and Japan’s Hayabusa spacecraft in 2005 touched down on asteroid 25143 Itokowa and collected a few specks of the asteroid material which were returned to Earth in 2010.