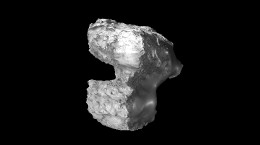
Regular readers of this blog will have seen the recent images of comet 67P/Churyumov-Gerasimenko taken with Rosetta’s scientific camera OSIRIS as the comet and Rosetta head towards their early August rendezvous. In today’s entry, Rosetta Mission Manager Fred Jansen showcases complementary images from Rosetta’s Navigation Camera.
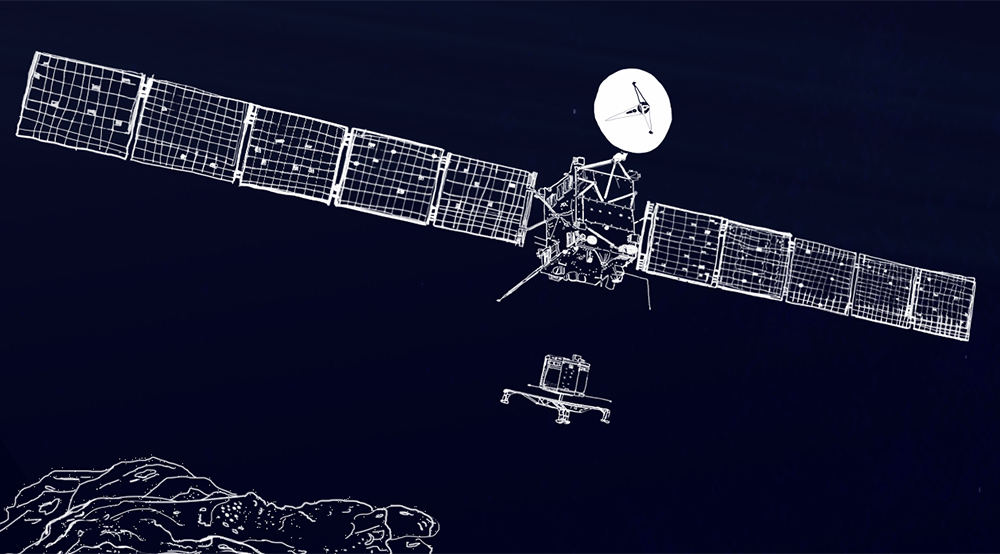
The navigation camera, or NAVCAM, is – as you can no doubt infer from its name – primarily used to help navigate the spacecraft. It’s on board so that images can be taken for this purpose without interfering with the operations of the scientific instruments.
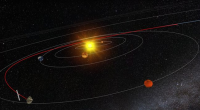
For example, NAVCAM was used for the complex manoeuvres that were required for the flybys of asteroids Šteins and Lutetia. Similarly, the NAVCAM is being used to visually track comet 67P/C-G. The observations are fed into the orbit determination process to refine the comet’s predicted location and to help refine Rosetta’s trajectory during its approach.
Once Rosetta has arrived at the comet in August, it will be used to navigate relative to landmarks that will be defined on the comet’s surface.
Here we have made an animation using a sequence of raw NAVCAM frames from 8 May to 22 June. The NAVCAM has a 5-degree field of view and takes 1024 x 1024 12-bit per pixel images. It’s pretty tough to spot the comet against the background stars at first and there is some fixed detector noise as well, but play the movie through a couple of times and it should become more obvious – it’s at the centre of the frame. Because the camera is always (except for a few frames near the end) pointed at the comet, the stars on the sky sweep by while 67P/C-G remains more or less stationary in the camera field.
The images have all been scaled to keep the comet at the same apparent brightness. So, in the movie, as Rosetta approaches the comet and the comet gets brighter, the stars and the fixed detector noise get fainter, and the background gets darker (access links to the original images here).
As with OSIRIS, we plan to share more NAVCAM images with you as we get closer to the comet. Because NAVCAM and the OSIRIS wide-angle camera have comparable resolution, we have an agreement with the OSIRIS team to try and avoid publishing too much NAVCAM data immediately, as they could be used to yield science data similar to that coming from OSIRIS. All Rosetta science instrument data have a proprietary period of 6 months, after which they will be publicly available in our archives, and thus all NAVCAM data will also be available no later than that.
Editor’s note: Join Fred in an ESA Google Hangout tomorrow at 13:30 CEST to learn more about Rosetta’s journey to comet 67P/C-G. Got a question? Post it below or ask it on Twitter with the hashtag #AskRosetta. Find out more here.




Discussion: 8 comments
What is the Orientation of Rosetta at present? Solar panels perpendicular or parallel to the ecliptic.
To what extent could the operations of Rosetta be effected by dust and gas production rates of the comet in its vicinity?
Land, ho !
What does a Rosetta Mission Manager do all day?
In orbiting phase how many thruster firings would be necessary, e.g. during a week?
How can Goldstone see Rosetta, but the comet itself is only visible in the South hemisphere.
Why the questions are not being answered? What a pity.
Hi Kilhor, in fact many of these questions were answered during the G+ Hangout mentioned in the post – we asked for questions to be posted here to be answered during that show. Here’s the link if you missed it: https://youtu.be/Ey0UedaFaMs?list=PLbyvawxScNbtAhH8vHAYl-pyEirPi-4Ad