Yesterday the ESA website introduced LIRIS, a new generation of imaging sensors that will be demonstrated on ATV-5. Here is some more technical information on the project:
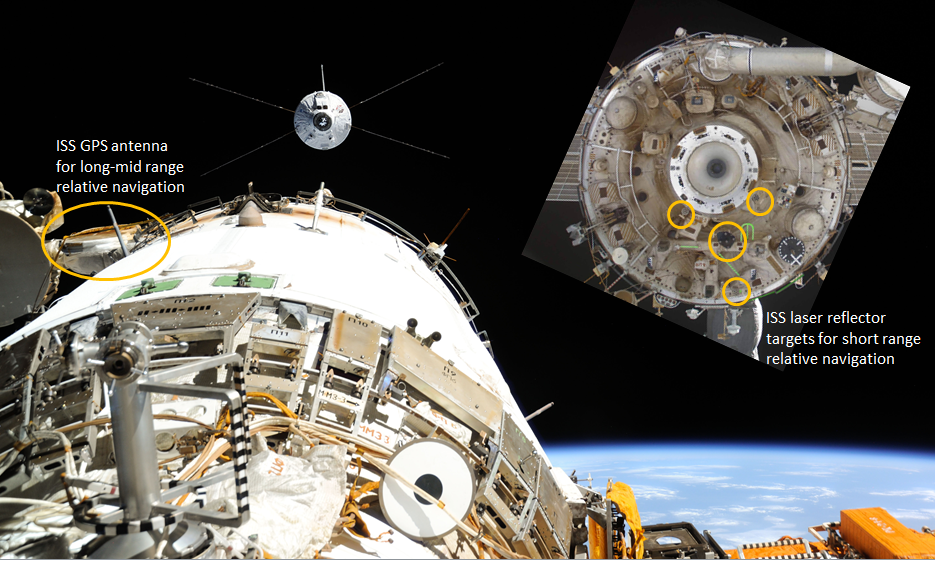
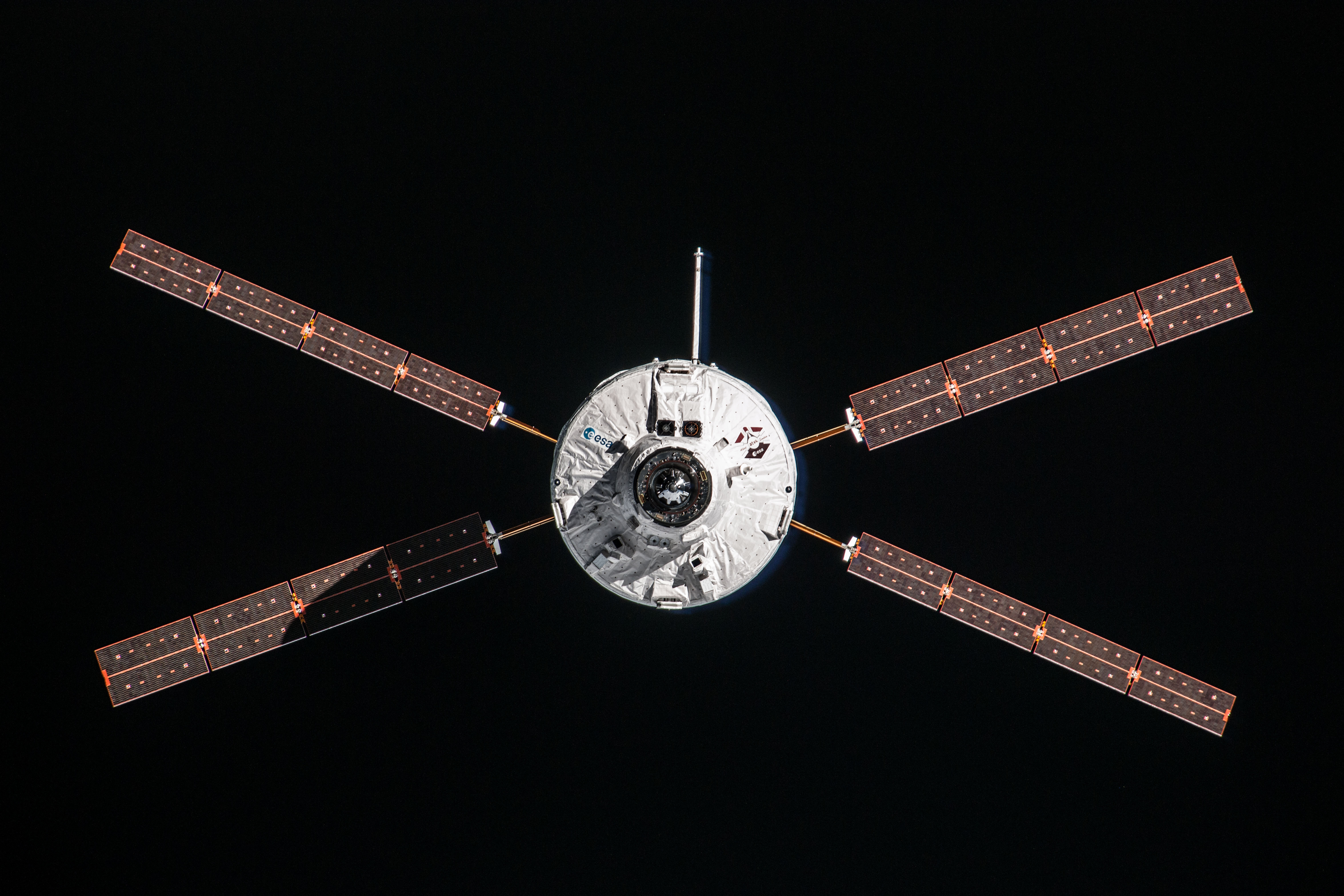
Illustration of cooperative navigation performed between ATV and Station during ATV-4 final approach
The Laser Infra-Red imaging Sensors (LIRIS) is a technology demonstration for future non-cooperative rendezvous applications that will be demonstrated on the last ATV mission Georges Lemaître launching this year.
ATV navigation is based on cooperative rendezvous technology. At long range, relative GPS navigation is used, based on data from ATV’s and the International Space Station’s GPS receiver measurements. At short range, navigation uses optical sensors on ATV (videometers and telegoniometers) that bounce off a set of targets on the Space Station, the so called retro-reflectors.
To develop non‐cooperative rendezvous technologies, new types of sensors, image processing and Guidance Navigation & Control algorithms are being developed and tested. Previous ESA studies stressed the need for a rendezvous navigation based on image processing preferably coming from infrared cameras for long-range and lidar sensors for close range.
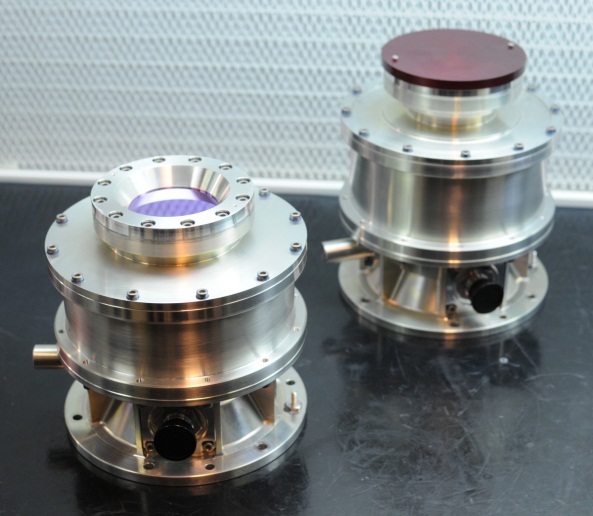
Sodern infrared sensors
Airbus Defence and Space in collaboration with Sodern and Jena-Optronik proposed to use the last ATV flight to implement a demonstration that will increase technology readiness for non-cooperative Rendezvous Sensors and Guidance Navigation & Control.
The LIRIS demonstrator is made of two parts, infrared and visible imaging provided by Sodern, and lidar sensing provided by Jena-Optronik.
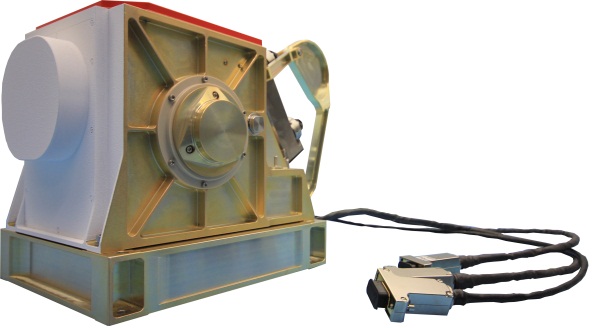
Jena-Optronik lidar optical head
The demonstration will fly these new sensor technologies and evaluate their results compared to the traditional guidance Navigation & Control system on ATVs.
The new sensors are placed on ATV spacecraft as passengers only. The data they record will not be used by ATV itself but stored onboard for later processing. The sensors are placed on the outside of ATV while the recording unit will be in the cargo hold. When the first ATV was designed the structure was put in place to accomodate these kinds of payloads, with wires running from the pressurised module to the outside.

Operating ranges for LIRIS
The demonstration will cover the full range of rendezvous from a far distance of at least 30 km until docking. The infrared and visible camera sensors will operate from far-range to docking and the lidar sensor from short range, about 3.5 km, to docking.
A planned fly-around of the International Space Station will test the new sensors as thoroughly as possible.
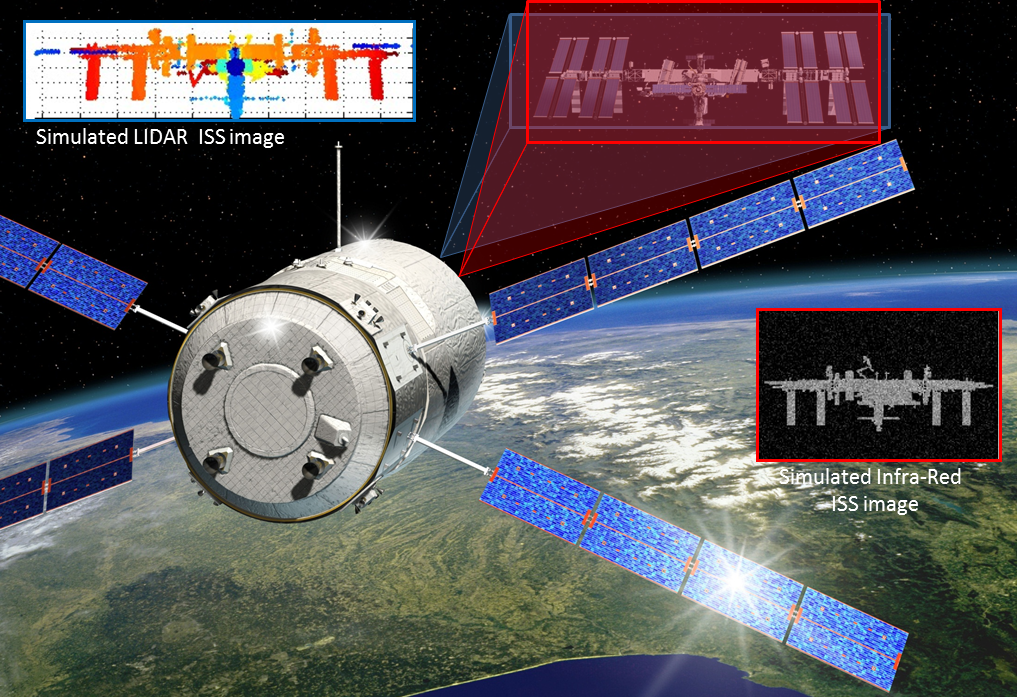
Illustration of ATV approaching Station with LIRIS sensors capturing images
 Automated Transfer Vehicle page
Automated Transfer Vehicle page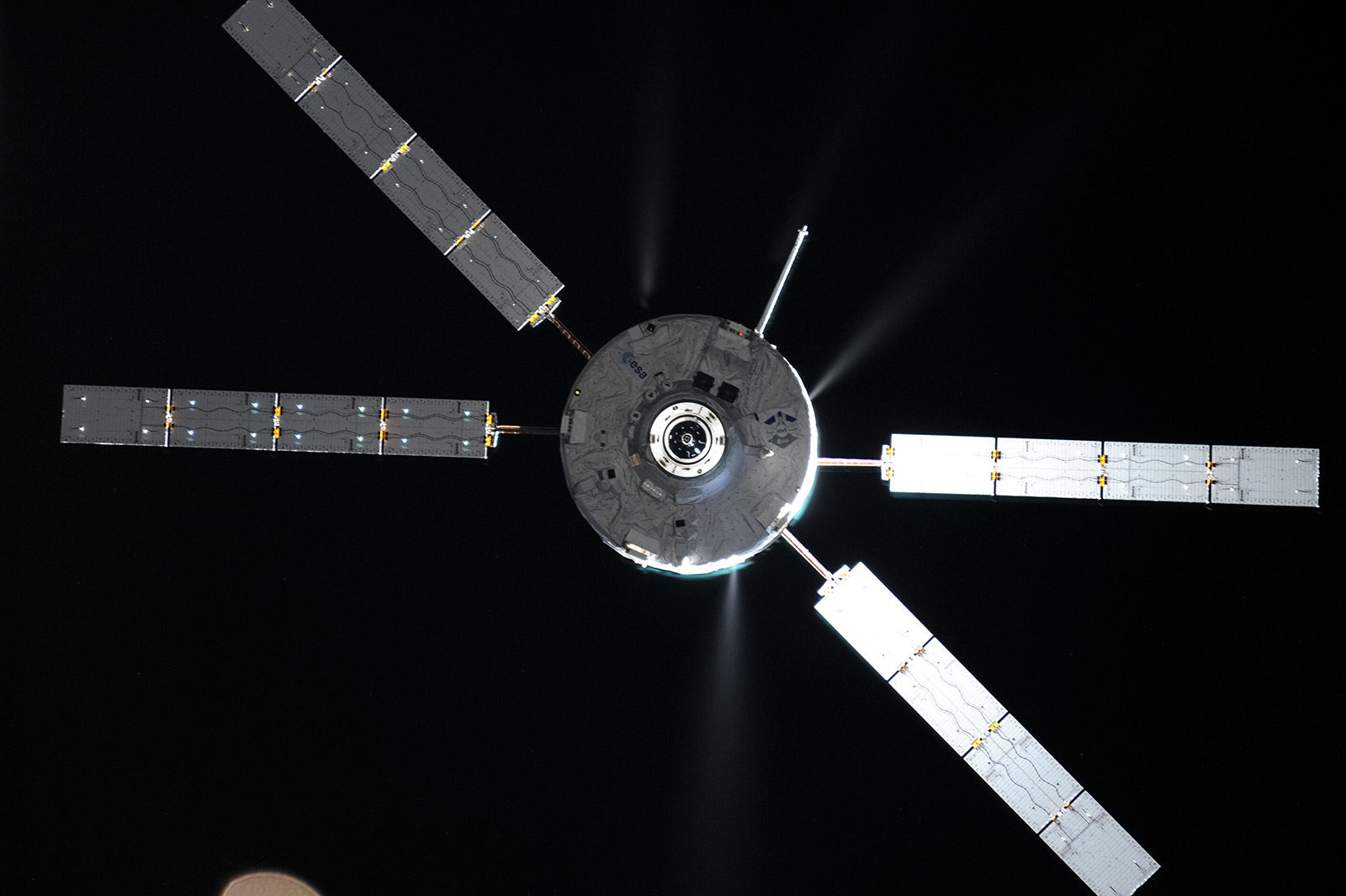 ATV blog archive
ATV blog archive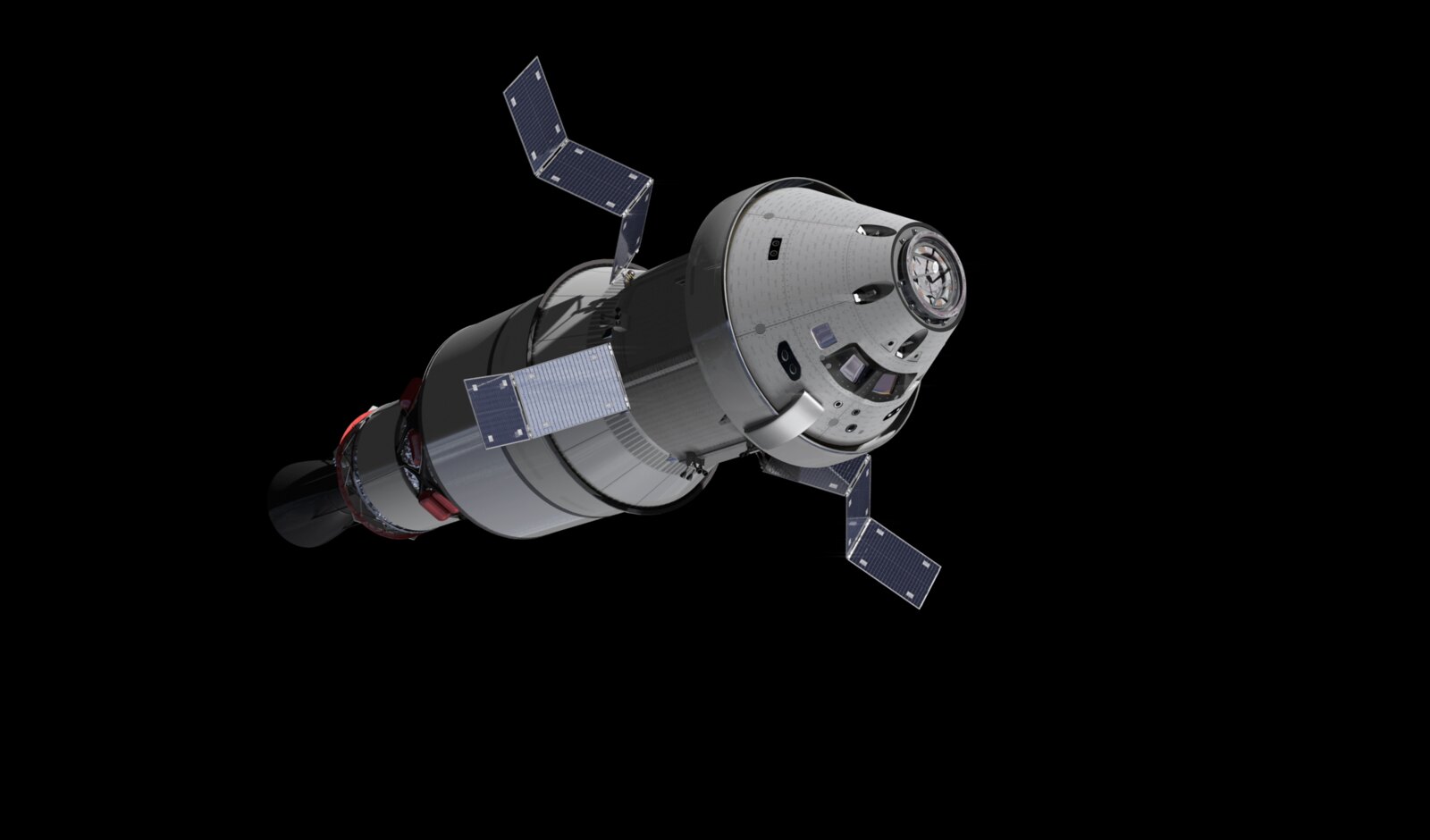
Discussion: no comments