[updated 26.03] ATV Edoardo Amaldi is performing extremely well!
As of mid-day yesterday, Saturday, the first two phasing manoeuvres (burns) had been completed, and, as of 19:09 CET, Amaldi was orbiting between 275 and 295km altitude. Additional phasing burns were conducted today; with each burn, ATV gets higher and closer to the ISS orbit. Average temperature inside the ATV cargo carrier? A comfy 21.5C. Overall status? Everything is nominal.
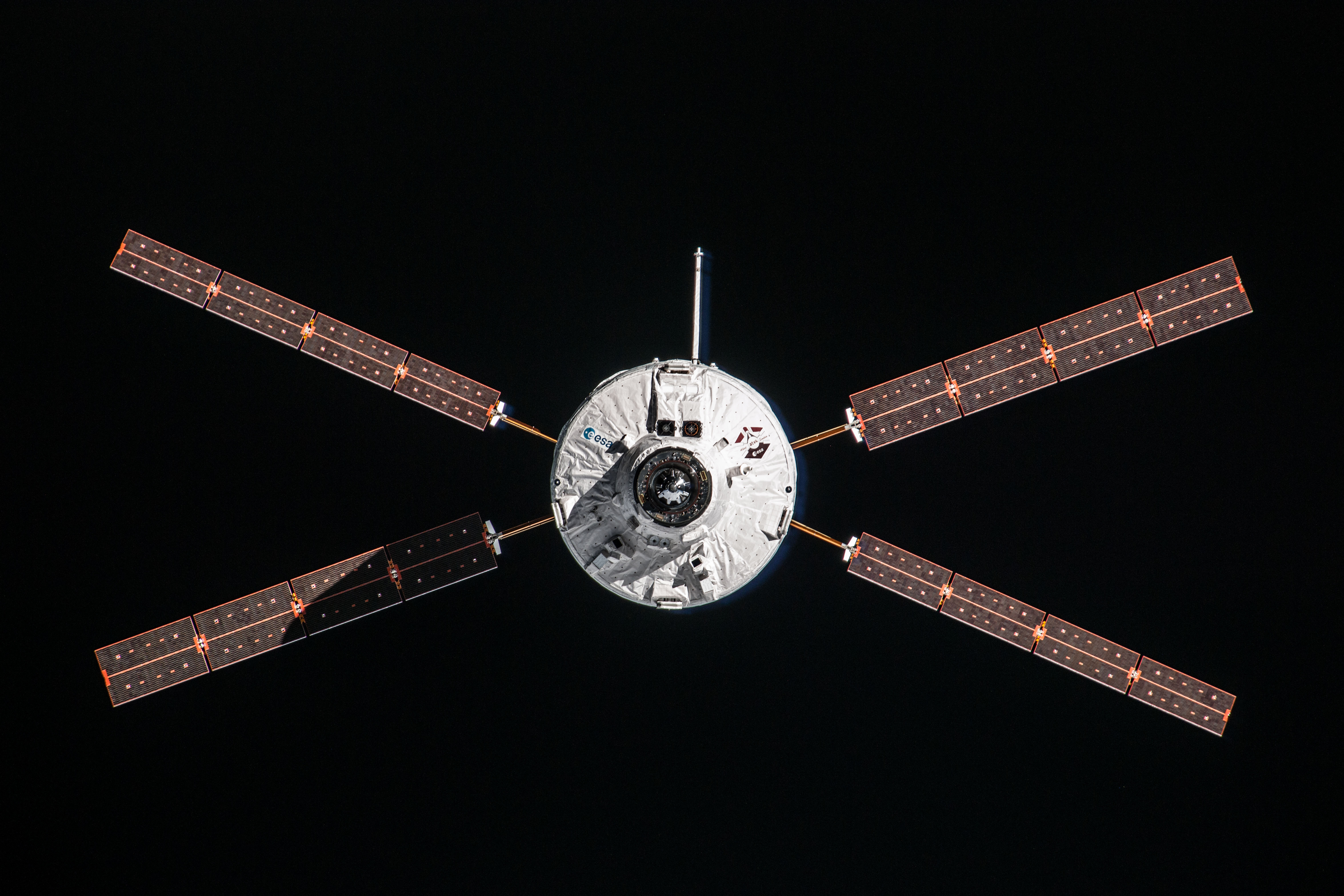
ATV-3 LEOP and approach to the ISS — animation showing solar arrays unfolding and rotating, proximity (ATV-to-ISS) antenna boom deployment and GPS signal acquisition.
One minor issue was seen during the Launch and Early Orbit Phase (LEOP) — it was noted that the ATV’s Proximity Link Antenna Boom (the Antenna Deployable Boom or ADB) had correctly deployed, but the final sensor confirmation that the boom was locked into place was not received.
The antenna is used for direct communication and data synchronisation between the ATV and Station during rendezvous (more details on the Proximity Link System here).
The ATV-CC operations team checked with the industry technical representatives, and it was suspected that there could be a problem with the boom, or with the locking sensor.
(You can see the boom deploy in YouTube video above or in the 2011 ATV music video here – at the 3:52 point.)
Yesterday, since ATV is orbiting just 100km below the ISS, it was decided to ask the crew to get a picture for a visual confirmation that the antenna was in place. The ATV attitude was accordingly manoeuvred a bit, so that the astronauts would get a good view of the antenna boom the next time ATV passed by below.
Before the astronauts could do so however, at 09:03 CEST this morning, the telemetry status from ATV switched over to ‘ADB Locked’. End of problem.
But what caused the sensor to switch to green? ESA’s Daniel Firre, the Mission Director on console this morning when it switched, says a number of causes are possible. It could be vibrations from the manoeuvre, exposure of a boom element to solar heat, or even the unfreezing of a small piece that might have been blocking the mechanism or the sensor.

ATV telemetry screenshot: ABD Locked Credit: ESA/D. Firre
Never let it be said that we don’t
show screen-shots of ATV telemetry
“This last status [confirms] the perfect behaviour of ATV; all its systems being nominal and leaving the ground teams happy and confident in this incredible vehicle,” said Firre.
“ATV-3 is on its way to ISS”
Follow-up 26.03:
NASA have posted this note in their daily Station report:
ATV Photography: In a last-minute addition to their timeline, between 2:55am-3:15am EDT CDR Burbank, FE-5 Kuipers & FE-6 Pettit shot long-lens photography of the ATV-3 (Automated Transfer Vehicle 3) cargo ship as it passed underneath the ISS at a closest range of 104 km. Purpose: Ground analysis of the photos to verify full deployment of the ATV proximity operations antenna boom. [There have been indications that the boom may not be fully deployed (no “boom locked” signal received after deployment after launch). For the photography, Dan, Andre & Don carefully removed window scratch panes 5 & 6 in the Cupola and later reinstalled them, using PPE (Personal Protective Equipment (dust masks, nitrile gloves, photo/TV lens cloth) to protect the window scratch panes and primary pressure pane glass.]
 Automated Transfer Vehicle page
Automated Transfer Vehicle page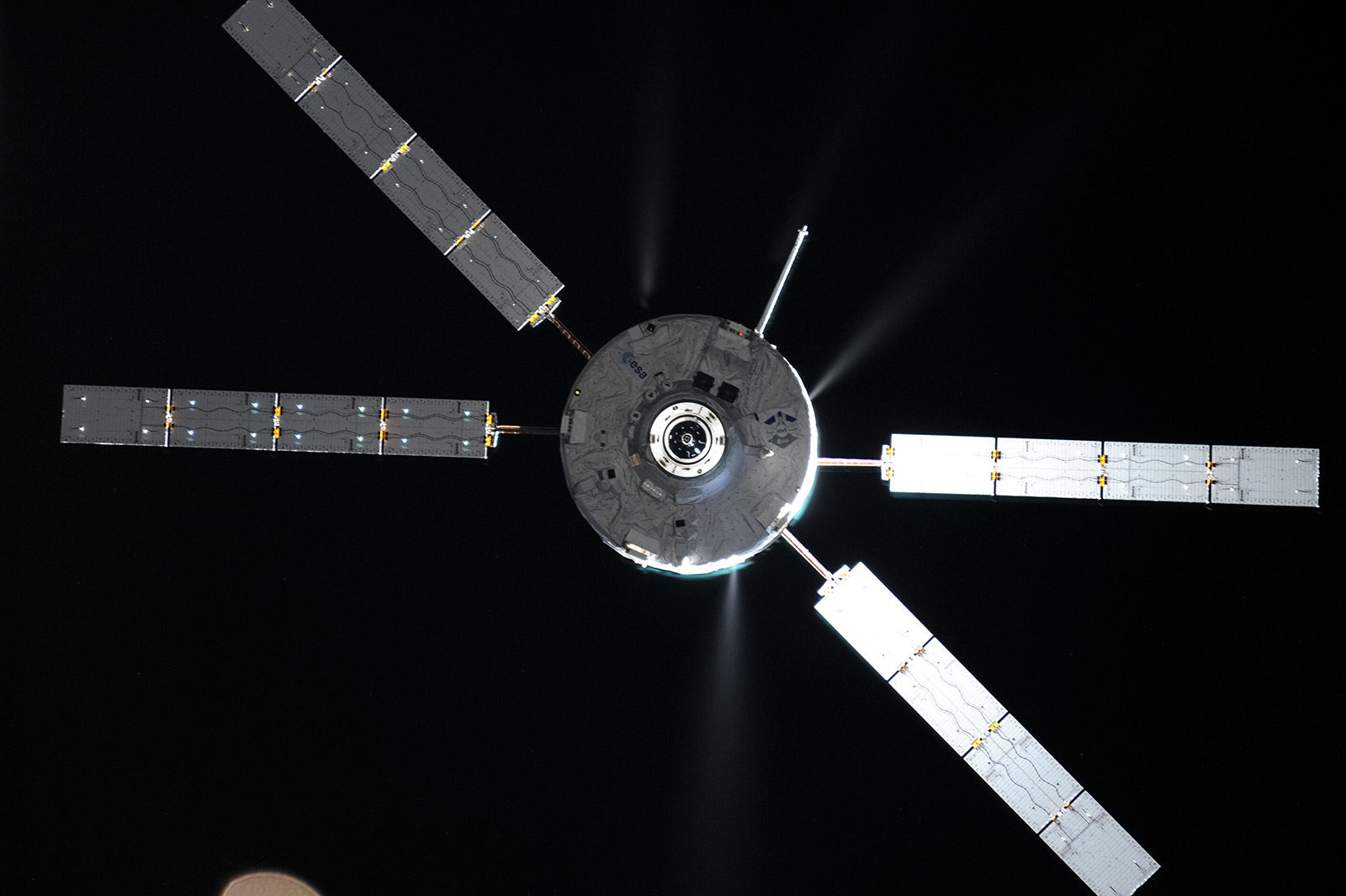 ATV blog archive
ATV blog archive
Discussion: no comments