Our team (from left: P. Steele, T. Bye Rinnan, S. Martin, V. Gopinath, T. Graber, D. Taubert, O. Ruf, M. Cardone, K. Nergaard) are Advanced Mission Concepts engineers supplemented with experience from ESOC’s Flight Control Teams and Mission Control System managers.
Imagine driving an interplanetary rover on the surface of, say, Mars, from afar with only basic information on the rover’s surroundings. Now imagine controlling several other rovers close by at the same time. In addition, your commands will take minutes to travel to and from the rovers.
Traditional spacecraft operations techniques would not enable robust scientific results from the rovers under the difficult conditions above, which is why we are testing new concepts for rover control. The Meteron Flight Control Team at ESA’s ESOC operations centre creates and investigates new operational concepts and technologies to make missions that have astronauts interacting with robotic systems a possibility on (or near) other planets and moons.
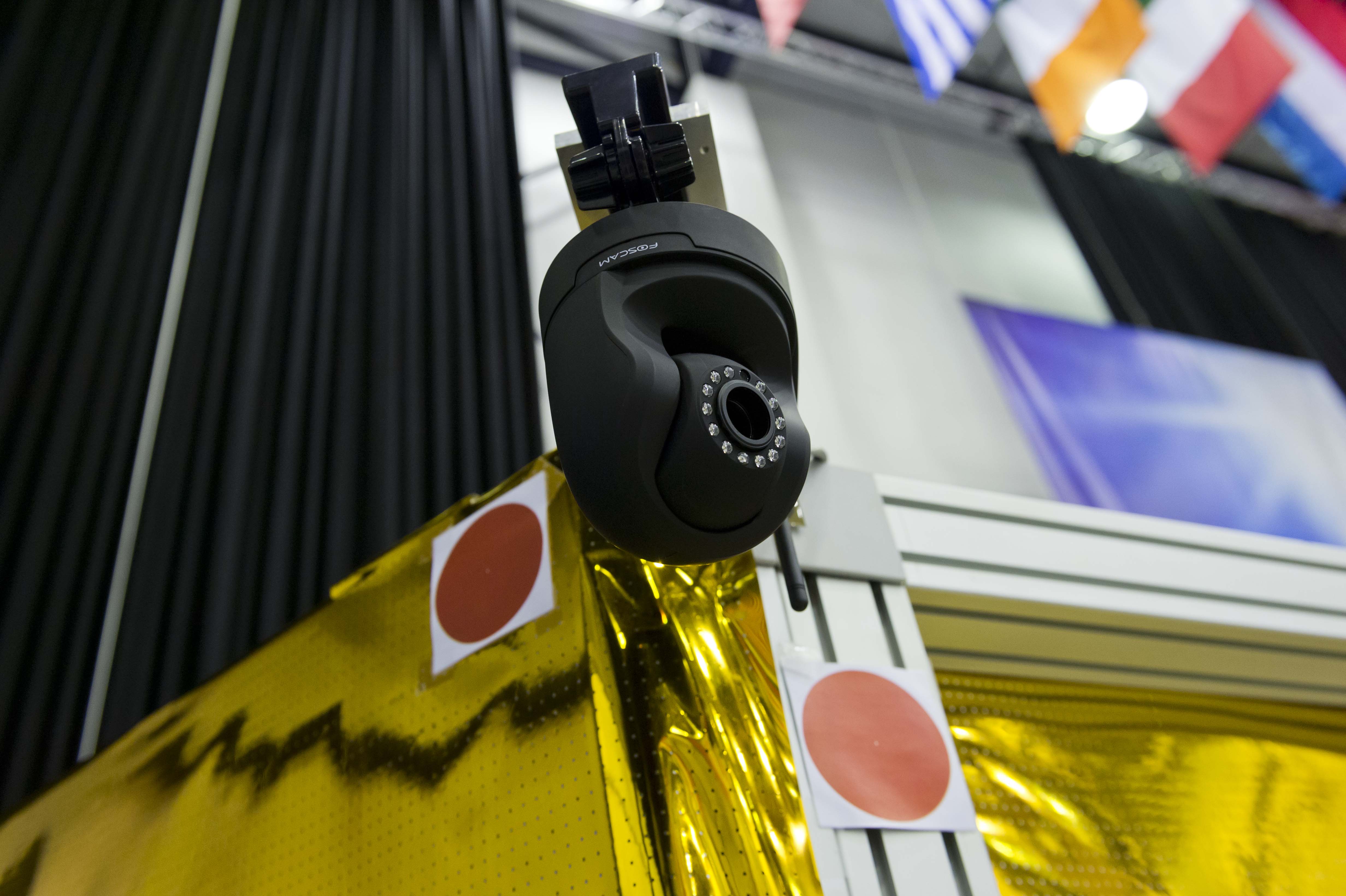
Camera on lander mock-up controlled from ESOC. Credits: ESA-A. Le Floc’h
We work with ESA’s technical centre, ESTEC, International Space Station operation teams and European industry to develop procedures to monitor and control activities on the surface, such as a rover’s next location, heading or camera position.
For the SUPVIS-E experiment that will take place in September, ESA astronaut Andreas Mogensen on the International Space Station will execute a series of rover tasks with the car-sized Eurobot in ESTEC. In parallel, we will support him from our facility at ESOC in Germany by controlling, via the Space Station, a second surveyor rover and a lander mockup.
We are testing experimental flight rules, communications and mission control systems first by running ground experiments then using the International Space Station for (hopefully) future interplanetary rover missions.
ESOC Meteron team via Paul Steele
Discussion: no comments