
Luca’s first telerobotics experience from ISS. Credits ESA/NASA
Hundreds of kilometres below his floating feet, a robot on Earth obeyed Luca’s commands from space. It was the first time the European astronaut remotely operated NASA’s K10 planetary rover, a little four-wheel steer robot that scouted a rocky, lunar-like terrain in the US.
Luca and the robot teamed up for a teleoperation of a planetary rover from the International Space Station. The first test took place in June, when his crewmate Chris Cassidy drove K10 in the Roverscape, an outdoor field at NASA Ames Research Center in California, USA.
“The idea is that one day, on a different planet, we might use a robot just like K10 to deploy equipment on the ground and do a safety check before we land,” explains Luca.
For a few hours, he performed a fully-interactive exercise with the robot. Luca received telemetry data and real-time video from the rover and monitored its reactions to his commands via virtual terrain displays.
Interplanetary communication
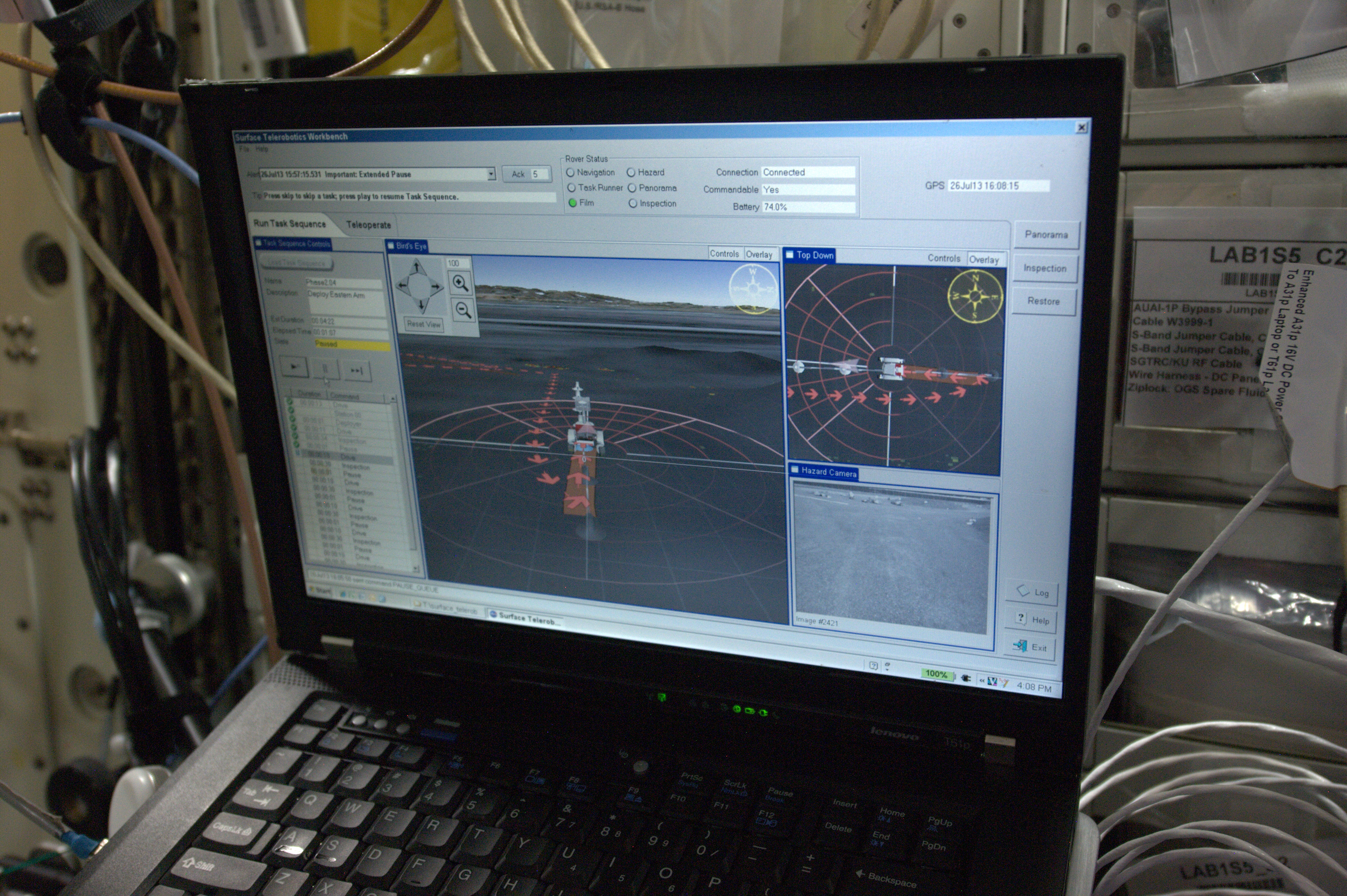
Where to go? Luca Parmitano sent commands via a computer in space to the rover on ground.
Credits: ESA/NASA
Luca tested some of the communication skills participants of the Volare Space Robotics competition will need for the finals held in October. Youngsters have been challenged to build a robot to unload, carry and store cargo from one module to another in a Space Station mockup.
Like in the K10 experiment, the finalists will have to cope with communication delays and disruptions. How will they control the robot in case signal loss or malfunctions? On Mars, for example, there is an eight-minute delay before a signal reaches the Earth.
These exercises help understand how humans and robots can work together. “This is an exciting idea that represents the future of exploration: the interaction between an astronaut on a future spacecraft and a rover on the surface of an unexplored planet will be vital,” says Luca.
ESA is also developing technology to remotely operate robots on the Moon, Mars or an asteroid. The project is called METERON, Multipurpose End-To-End Robotic Operation Network, and aims at making teleoperation of robots from space a routine. The METERON project performed a test with NASA astronaut Sunita Williams last year on their own planetary rover Mocup.
André Schiele, head of ESA Telerobotics and Haptics Laboratory, explains how valuable are robots as planetary scouters. “When humans fly to Mars we first want to send robots to prepare the way for them, performing the manual hard labour. When the astronauts arrive, they can wait in orbit for the robots to finish building a base for the astronauts to live and work,” he stated in an interview to Space Exploration Network.


Discussion: one comment
On … on … on … to new frontiers!
It will be accessible to all the space one day?