By planetary scientist Elliot Sefton-Nash and Luc Joudrier, Rosalind Franklin rover operations
In November, scientists and engineers who will operate the Rosalind Franklin rover met at the Rover Operations Control Centre (ROCC), in Turin, to put operations processes and tools to the test.
While the Rosalind Franklin rover is undergoing key maintenance and refurbishment, the new European Entry, Descent and Landing Module is being built. In parallel, the team responsible for daily operations of the rover and scientific instruments continue their preparations by holding regular exercises.

Science team discussing strategic plans. Credits: ESA
These so-called ‘mini-simulations’ or MiniSims provide opportunities to simulate hypothetical mission scenarios. These scenarios are prepared in advance by a team of simulation officers who generate the schedule, tasks, roles and simulated data from rover instruments.
The rover raises itself from stowed to deployed, an operation that takes a few martian days and is closely monitored by ground control on Earth. While the rover is still on the landing platform, the team uses this time to perform strategic planning activities during first few days after landing.
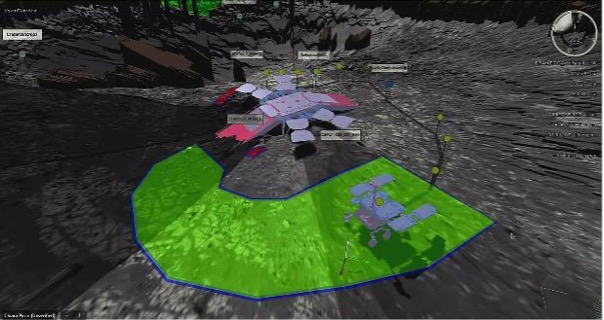
To check the rover’s mobility system before leaving the landing platform, the Control Team evaluated the terrain around it on the virtual environment using the Rover Visualisation & Planning Tool RVP. Credits: ESA
Eyes on Mars
“Simulated” images from the panoramic and navigation cameras – PanCam and NavCam – cameras were taken as soon as Rosalind Franklin’s mast deployed, then combined to make a panorama of the immediate surroundings.
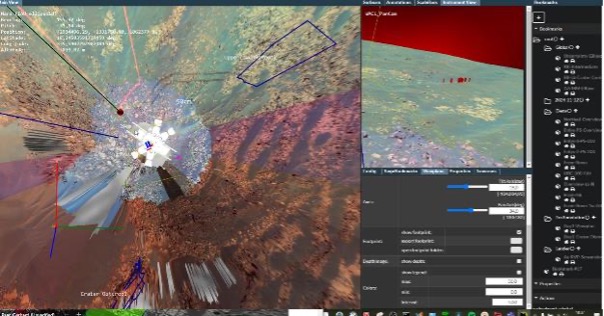
Scientists used the ‘Pro3D’ tool from the PanCam team to view panoramas and select imaging targets for the Control Team. Credits: ESA/PanCam
To represent the martian surface at the Oxia Planum landing site, the simulation officers used images taken in 2006 by the NASA Mars Exploration Rover Opportunity, at ‘Beagle Crater’ in Meridiani Planum. The data were re-processed to appear as if they were acquired by Rosalind Franklin rover instruments and included synthetic infrared spectra, which were supplied by scientists from the Enfys infrared (IR) spectrometer team.

A geologists’ interpretation of the first images received from Oxia Planum. The simulation used images taken in 2006 by the NASA Mars Exploration Rover Opportunity at ‘Beagle Crater’ in Meridiani Planum. Credits: NASA/ESA
At the start of the simulation, the landing point was known to within one kilometre, as would be derived from telemetry returned after the Entry Descent and Landing (EDL). In the real mission additional tools would be available to refine the location, but using only the surface panorama and orbital images, scientists in the simulation quickly zeroed in on the most likely candidate landing points in the area.
A good match was found, which was possible because Beagle crater is similar in size to a crater in central Oxia Planum. The crater (named ‘Vindobona’ by the team) was positioned near a boundary mapped from orbit that indicated a change in the composition of the clay minerals exposed in the bedrock.
Exploration strategies
With the landing point established, the science team worked on ‘strategic localisation’ – to identify potential targets, sites and traverses according to science priorities.
The Rover Control Team focussed first on preparing activity plans for the next few sols, or martian days, centred on rover deployment activities and preparing to egress from the landing platform. The science team requested to observe nearby priority targets using the PanCam High-Resolution Camera (HRC) and Enfys IR spectrometer.
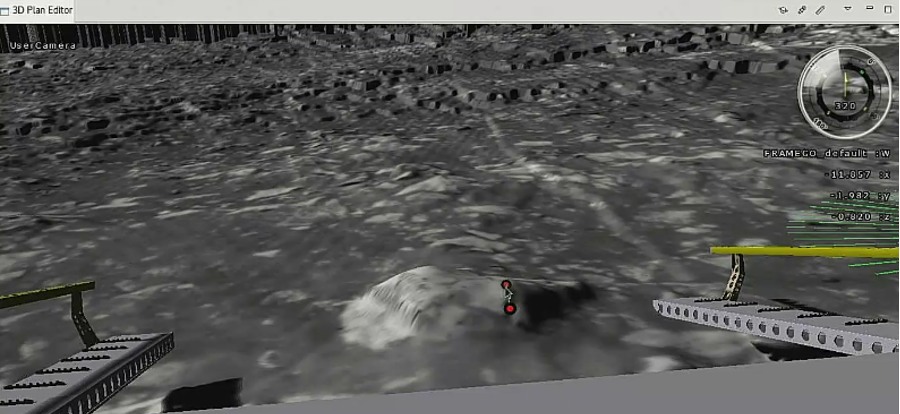
The Control Team evaluated the feasibility to leave the landing platform and which side to use to drive off on the virtual environment. Credits: ESA
The platform has ramps on two sides, and the Control Team determined that egress in either direction was possible. Based on their assessment of the inclination of the platform and potential hazards for the rover, there was a preference for a forward egress. The team agreed that the final decision would be taken once the longer-term traverse direction was chosen.
Two destinations, one mission
Working in parallel, using a geologic map of the site, orbital data, and the identified features of interest, the Science Team devised notional traverses that the Control Team then analysed to determine their feasibility to complete within the seventh-month nominal mission. Two potential mission profiles emerged, towards two almost opposite directions from the landing point.
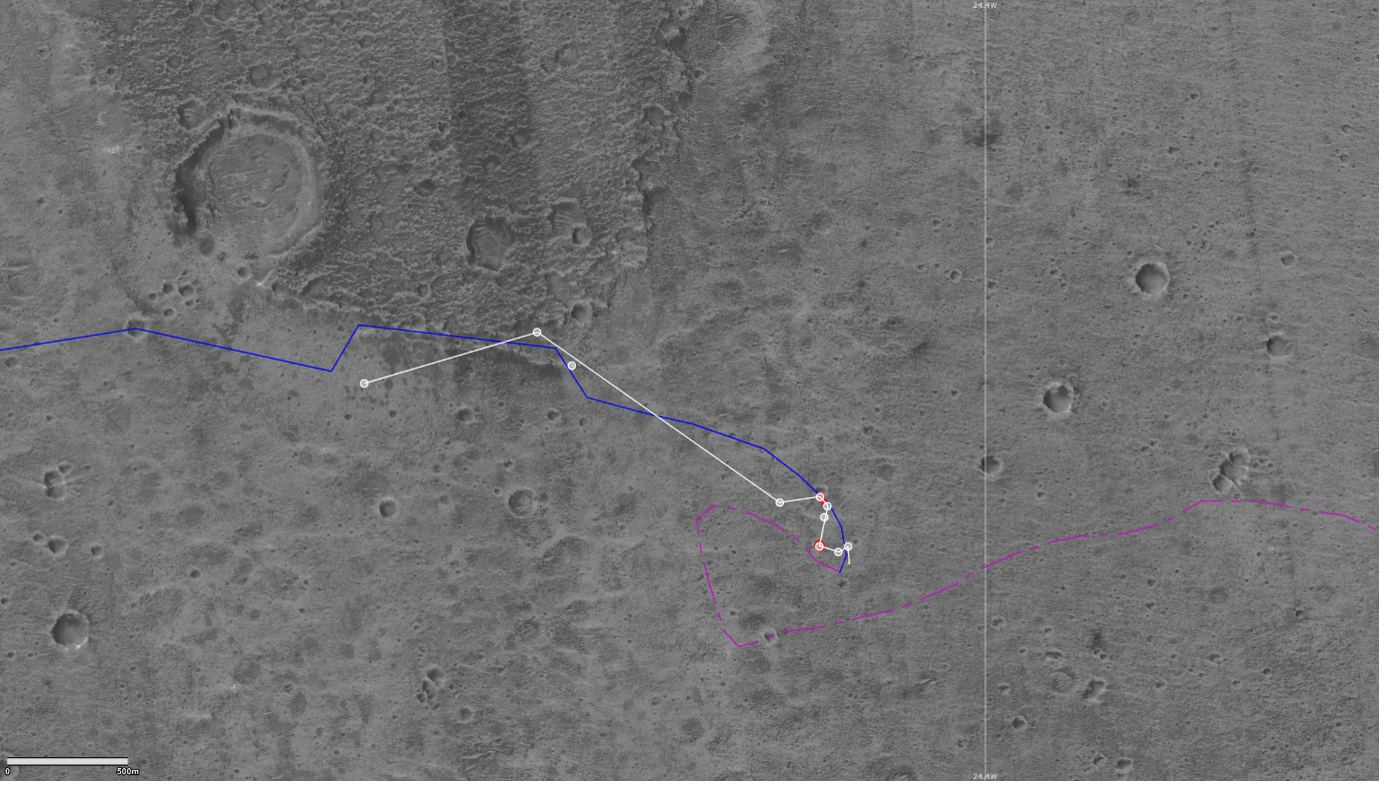
Identifying initial targets of interest and possible long-term traverses, in two opposite directions! Credits: ESA
The team set long-term objectives at this early point in the mission so that shorter-term decision-making could align with them. A key example of this was selecting the location to open the rover’s Analytical Laboratory Drawer (ALD). The ALD is sealed to prevent contamination by the chemical signatures of the landing event (i.e., descent engine exhaust byproducts) and must be opened at least 60 metres away from the landing point.
At a carefully chosen location, a set of activities known as ‘Science.0’ will be executed. This includes using the ALD instruments, MicrOmega, RLS and MOMA, on blank samples. This allows to characterise the background levels of organic molecules, important for interpreting organic signatures found in samples that will be collected by the rover’s drill, up to two metres below the surface.
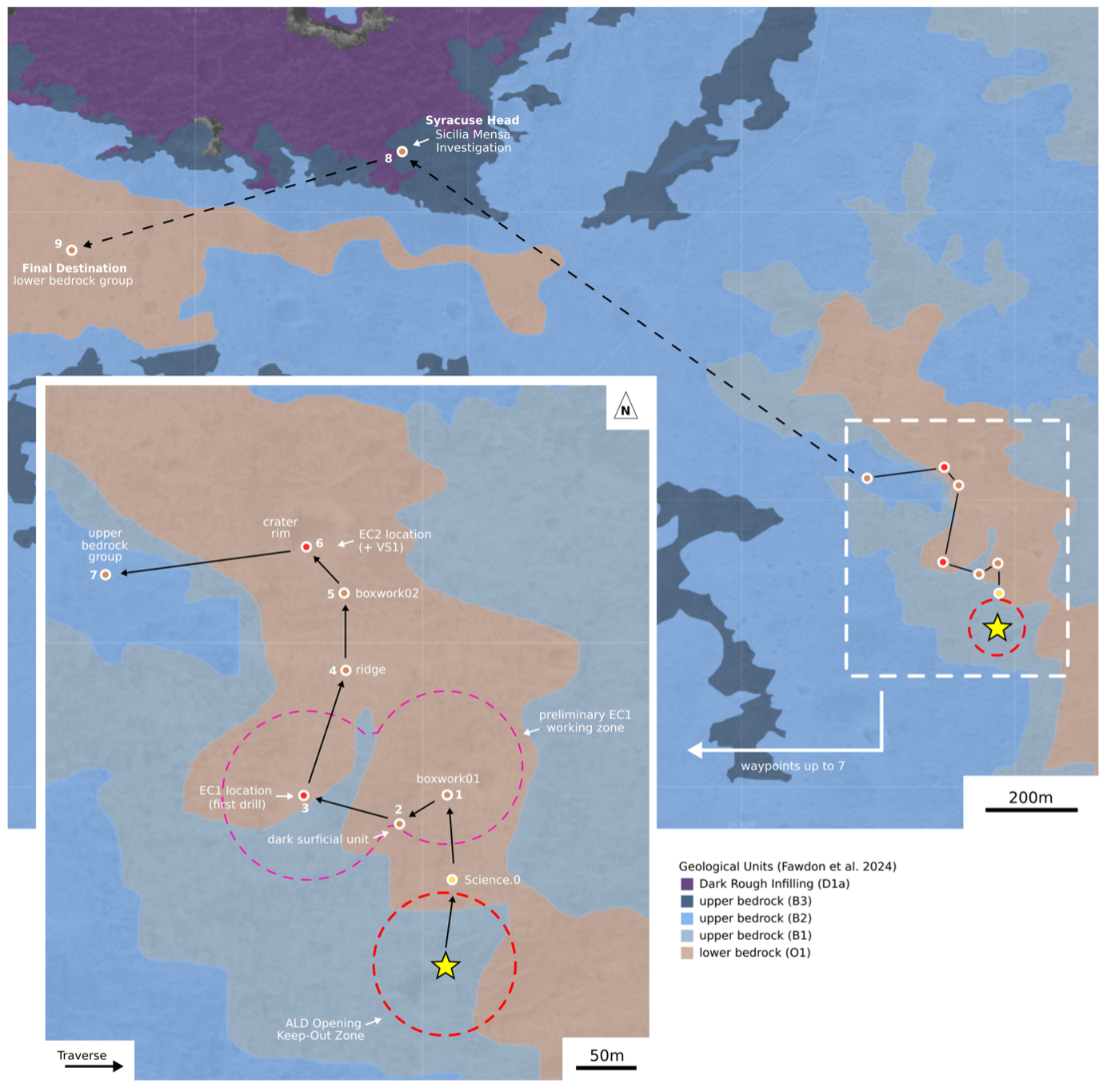
Long-term strategic planning took into account science priorities. The ‘Map Keeper’ in the science team produced and updated maps like this one at regular intervals. Credits: ESA
To complete the strategic planning objectives of the simulation, the team evaluated and refined the plans for the Commissioning phase, which cover approximately the first month of the mission.
Way forward
There are many aspects and details to the sol-by-sol strategic planning, from analysing the terrain expected on traverses between sites, to optimising the use of available resources such as energy, data downlink budget and time; and throughout the process making sure that the planned activities would allow investigation of the highest priority scientific targets.

The “Target Keeper” listening to science discussions from the main control room. This role defines the targets suggested by the scientists, documents them and sends them to the control team with any additional measurement requests. Credits: ESA
Being efficient, flexible, and thoroughly prepared were key in this setting, and the team worked together to achieve the objectives. The team of simulation officers are evaluating the outcome, gathering feedback and perspectives from participants, and identifying potential improvements to processes and tools.
With everything we learned this time, the team are looking forward to putting it into practise as they prepare for the next simulation!
Science and Control Teams at the Rover Operations Control Centre in Turin, Italy. More scientists were remotely connected to support. Credits: ESA/Altec Space
Discussion: no comments