Conditions on the surface of Mars four billion years ago were like those on infant Earth. Scientists believe that there is a chance that life may have developed on the Red Planet too.
The rover will dig, collect and investigate the chemical composition of material collected by the drill, including possible signs of life. Two sets of cameras and a ground penetrating radar will show scientists what lies ahead and under the rover to plan the drilling.
Watch Rosalind’s radar in action and see the samples from different angles from the point of view of the rover’s cameras.
Where to drill?
If evidence of past or present life is to be found anywhere on Mars, it would most likely be in the subsurface, where organic molecules are shielded from the destructive effects of ionising radiation, reactive oxidants and ultraviolet light.
Before collecting samples, it is important to understand a site’s geological history, especially the possible presence of water-rich conditions in the past. Water is a key ingredient for the origin and metabolism of life forms. Knowledge of the abundance, distribution, and state of subsurface water (both as a liquid and as ice) will help us understand the evolution of the martian surface and climate, as well as the chances for life to emerge.

View from above the surface using PanCam’s wide angle camera. Credits: ESA/Mlabspace
Rosalind Franklin will use the WISDOM radar to help scientists on Earth decide where to drill. The full name of this ground penetrating radar is Water Ice Subsurface Deposit Observation on Mars, and it is designed to identify layers down to three metres with a vertical resolution of three centimetres.
The rover sends electromagnetic pulses and “listens” for their echoes. Moving in steps of 10 centimetres each, Rosalind Franklin fires radar pulses at every stop.
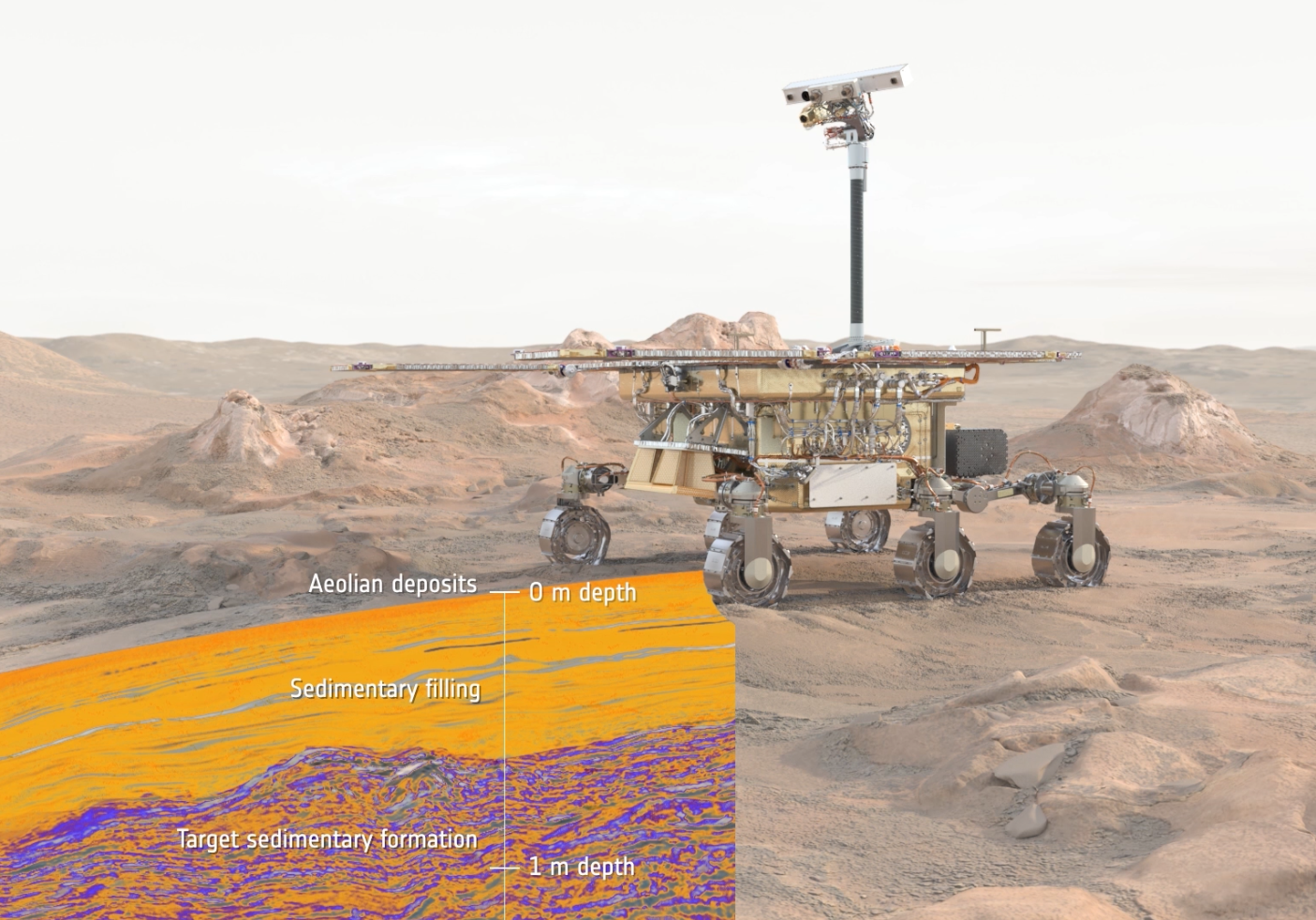
Mapping the subsurface with the WISDOM radar. Credits: ESA/Mlabspace
Once the WISDOM measurements come down to Earth, scientists will use them to build a radargram – a map of changes a map of changes in sensitivity to electromagnetism, which corresponds to different materials.
The science community is particularly interested in identifying soft, sedimentary layers that could have been formed in the presence of water, such as clays or hydrothermal deposits, that lie at depths that the drill can reach.
Besides identifying the most promising targets for sampling, the data will help the rover avoid potential hazards such as buried rocks that could damage the drill.
A closer look
The Close-UP Imager (CLUPI) sits on the side of the drill box, a camera designed to acquire high-resolution, colour, close-up images of outcrops, rocks and soils.
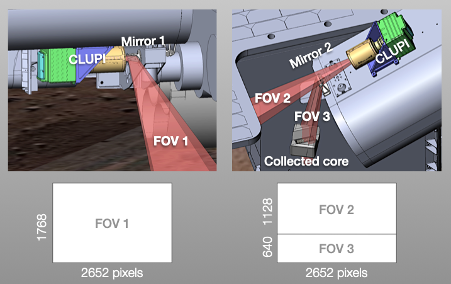
CLUPI camera’s fields of view depending on drill box position. Credits: ESA
CLUPI uses a clever set of mirrors to see in different directions (Fig. 1). When the drill is in its horizontal, parked position, CLUPI looks towards the front field of view.
However, in all other drill positions – when raised or tilted – CLUPI’s field of view is split in two. By pointing the drill box in different orientations, this mirror setup allows CLUPI to image the fine soil knocked off during drilling, the sample after collection, or details of outcrops.
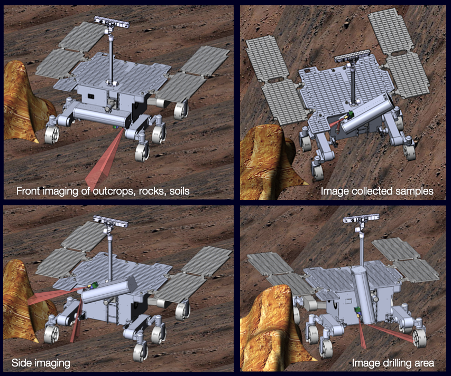
CLUPI can see in various directions depending on how the drill box is angled. Credits: ESA
Once Rosalind Franklin reaches the target location, CLUPI takes a picture of the surface. The drilling operation proceeds slowly to ensure that the string does not get stuck. It can take up to four sols, or martian days, to reach the maximum depth of two metres.
The temperature 50 cm below the surface is very low, approximately –60ºC. That’s the average between the roughly zero degrees at noon and the –120ºC during the cold martian nights.
As the fines come out of the borehole, CLUPI is ready to take pictures of the soil that is churned out by the drilling action.
Got it!
After the rover retracts its drill, the sample is in a special chamber at the tip. The front of the drill tip opens and a piston pushes the sample out. Under the reduced martian gravity (38% of Earth’s), the material drops onto a special “hand” that the rover can extend to the front to collect drill samples.

Rosalind’s drill delivers a martian sample for analysis. Credits: ESA/Mlabspace
The scientific eyes of the rover are set on the Panoramic Camera suite known as PanCam. PanCam hasthree ‘science eyes’: two wide-angle and one high-resolution camera.
The sample is first imaged using PanCam’s wide angle pair’s right eye. Next is the turn of the high-resolution camera. This camera has eight times the resolution of the wide-angle cameras to closely examine rock texture and grain size in colour.
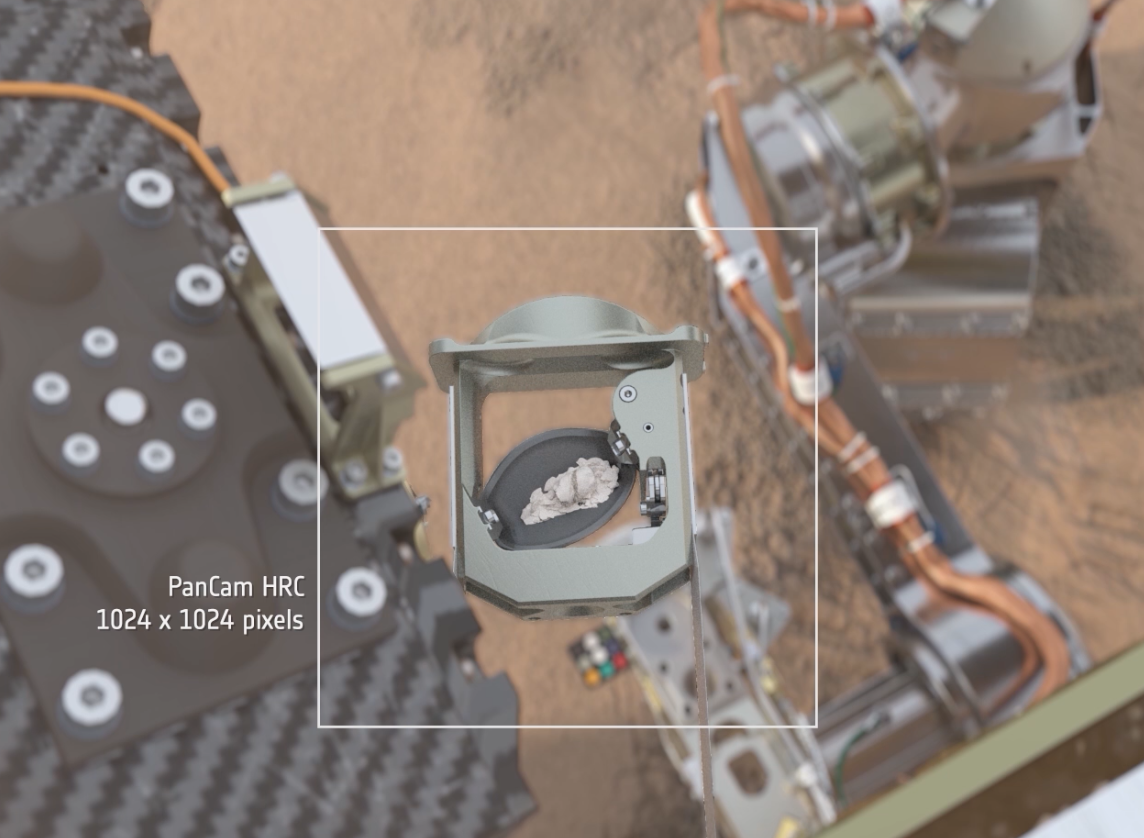
PanCam’s high-resolution camera examines rock texture and grain size of the sample. Credits: ESA/Mlabspace
Finally, CLUPI obtains the highest resolution images of the sample in the order of 20 microns per pixel. It does this by building an image mosaic. The “hand” is retracted in stages and at each position, CLUPI obtains a z-stack set of images. Z-stacking is a very special technique. CLUPI snaps a set of pictures at different focal distances and processes them to retain only the pixels that are in focus. The image stack is then “collapsed” to produce one image where all the pixels are in perfect focus. By using this method at different “hand” positions, we can construct an accurate view of the sample.

CLUPI images in great detail the fine soil knocked off during drilling. Credits: ESA/Mlabspace
PanCam and CLUPI will help scientists find the most promising spots to drill. These instruments can alsoinvestigate very fine outcrop details and image drill samples before they are sent into the rover’s laboratory.
Next up: drilling in detail.
Follow the journey with ESA’s Rosalind Franklin rover series.
Discussion: 2 comments
Excellent… ✌?
#LifeOnMars
Curiosity
Preservarance
#CocosIsland ?to #PlanetMars?
?