Confirmation that they can attempt the extra maneuver gets the team to their feet at ESOC. Credit: ESA/L.Wellard
During a forseen LOS, or loss of signal, the team at Darmstadt are making some big decisions. Alex Gerst on the ISS is not in visibility, so they will resume some control of the Eurobot rover.
This was a planned optional segment of the experiment, for which they could not guarantee they would have time.

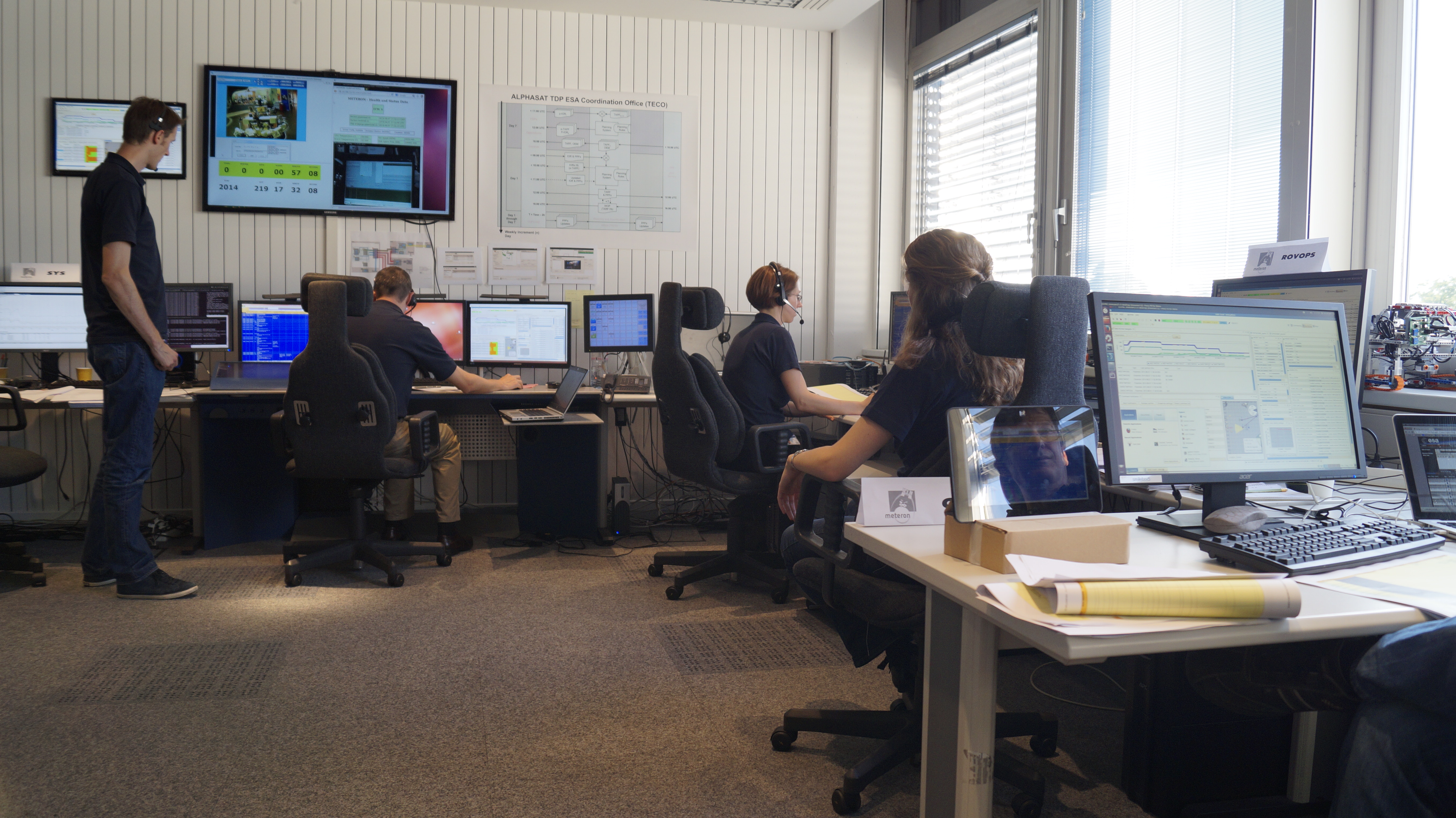
Kim Nergaard points to the small text box, shared by BUSOC, ESTEC, ESOC and Alex, to show how commands for the rover will be coordinated. Credit: ESA/L.Wellard
A shared text window will be available to ESTEC, ESOC and BUSOC in Belgium, to coordinate who gives which commands to the rover. When Alex comes back online, he will supervise the movement of the rover. A video window will show him what is happening in The Netherlands.
After this time, he will resume control– he’ll take back the wheel so to say.
This extra manouver during the experiment is only possible because of how efficiently Alex was able to follow the directions sent to him by the team at ESOC. It’s a windfall, and a big one.
As a thank-you, the team sent Alex a picture of his “rover driver’s license”. He was very grateful.

The last image that the rover sent Alex as he was supervising. Credit: ESA/L.Wellard
Discussion: no comments