Alex is now working on the steps outlined by the team. The experiment being carried out today will validate this procedure for controlling vehicles from extended distances. In the future, it may even validate procedures for exploring other planetary bodies.
The rover is making its first calculated steps at ESTEC, in Nordwijk, The Netherlands. Alex must follow the steps to the letter, as any false command can send the rover to far in any direction running it into objects.
The rover is moved by a command which sends it in a straight line in any direction. Eurobot will then snap a picture, and send it back to the controller. The picture gives more information about where to proceed next.
The ground has far more interaction with the driver and the rover than ever before.
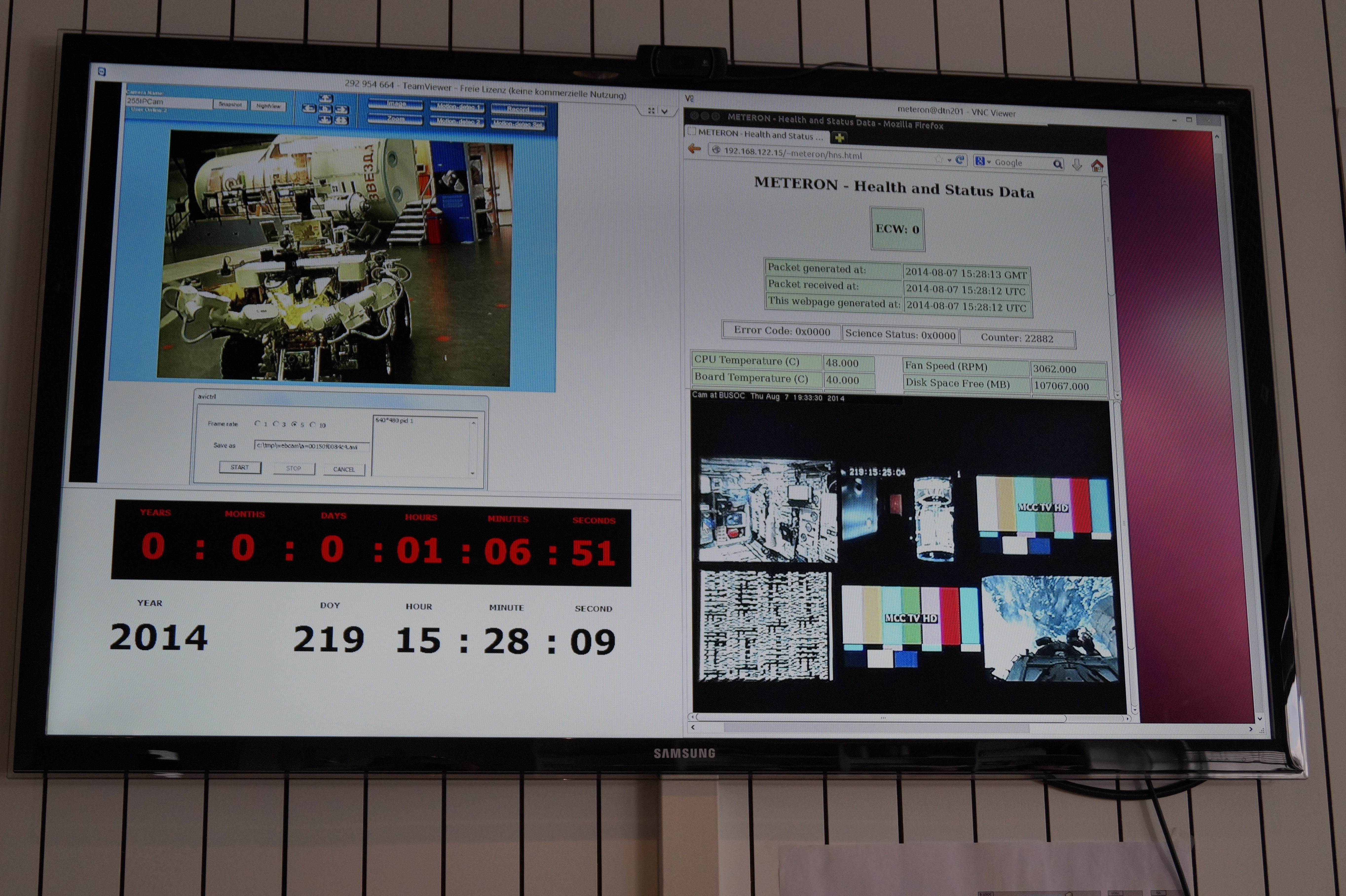
 The”before and after” images, the rover has moved! And the screen at the bottom right shows Alex’s computer as he inputs the commands. Seeing his computer allows the team to monitor his progress. Credit ESA/L.Wellard
The”before and after” images, the rover has moved! And the screen at the bottom right shows Alex’s computer as he inputs the commands. Seeing his computer allows the team to monitor his progress. Credit ESA/L.Wellard
Discussion: no comments