Update from ESA Mission Director Jean-Michel Bois at ATV-CC.
The chase is on!
Tonight’s three manoeuvres are complete. ATV-5 is now behind the ISS and ready to perform the rendezvous and docking on 12 August at 13:30 GMT (15:30 CEST).
Here’s what’s been happening Credit: CNES
After the fly-under on 8 August, ATV was located in front of, and below, the ISS. To put ATV into its nominal position to perform tomorrow’s docking, Georges Lemaître had to be brought back behind Station.
On 9 August, as set of boosts (‘TA manoeuvres’) were performed to boost ATV above the ISS; moving the vessel higher than the ISS means it will move at a slower speed relative to the ISS. During 10 August, ATV drifted slowly back above the ISS.
Tonight, we performed the ‘TB symmetrical manoeuvres’ to move ATV back down below and behind the ISS, and ATV is now chasing Station.
The three TB boosts performed today comprised:
- TB1 : at 16:55:49 GMT , retrograde manoeuvre of -4.00 m/sec of delta velocity
- TB2 : at 17:47:20 GMT , retrograde manoeuvre of –8.08 m/sec of delta velocity
- TB3 : at 18:44:10 GMT, retrograde manoeuvrer of -2.89 m/sec of delta velocity
The main OCS (orbital control system) thrusters were used to perform these boosts, with a very high accuracy estimated at 0.3%
— JMB, Mission Director on console
 Automated Transfer Vehicle page
Automated Transfer Vehicle page ATV blog archive
ATV blog archive
Discussion: 3 comments
Hello there!
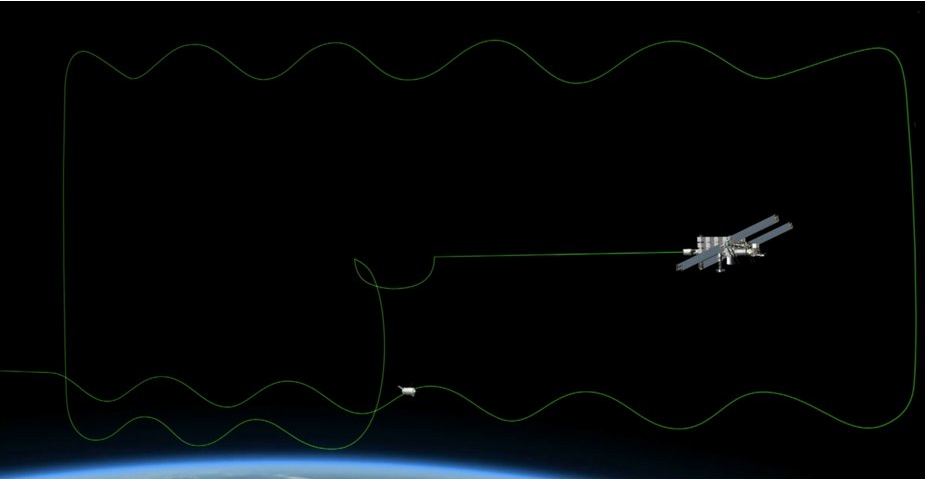
Can anyone please explain to me how this bouncing trajectory of ATV comes about (if its not too complicated).
Thank you very much in advance.
The ‘bouncing’ trajectory you see in the animation is actually a relative trajectory (motion of ATV with respect to the ISS). The ‘bouncing’ itself is due to the ATV apogee (higher altitude = top of bounce) and ATV perigee (lower altitude = bottom of bounce). No bouncing would mean ATV would always be on the same altitude = ATV on a circular orbit (to be accurate, it is co-elliptical with the orbit of the ISS, which has itself a small eccentricity). Specifically:
1) Below the ISS
The ‘bouncing’ trajectory is the result of the ATV trajectory design so as to reach a particular Waypoint called ‘S-1/2’, a few tens of kilometres behind the ISS (and few kilometres below ISS), with a given accuracy.
2) Above the ISS
The bouncing amplitude is actually very small (compared to what is plotted in the animation); this is due to the fact that there is no need to make the ATV orbit strictly circular – this would have been more elegant, but really not necessary for the ATV mission.
Best regards, Laurent & Arnaud, ATV-CC Flight Dynamics
Thank you very very much, Laurent and Arnaud!
I really appreciate your effort to answer my question and I think I have at least a glimpse now as to why the trajectory looks like it does.
And thanks to the Internet which has made it possible for people like me to ask questions to you guys at ESA so easily.