Tonight’s post contributed by ESA’s Olivier Mongrard, the LIRIS system engineer at ESTEC. For details on the LIRIS experiment, access “ATV-5 set to test new rendezvous sensors” in the main ESA website.
ATV5 is now cruising at an altitude of 350 km, about 60 km below the International Space Station. While waiting for the rendezvous and docking operations planned on 12 August, the ATV Control Centre team will command ATV5 through a series of manoeuvres starting tonight in order bring ATV just below the ISS, at a minimum relative altitude of 5 km, on Friday, 8 August around 22:40:00 UTC (00:40:00 CEST Saturday AM).
This dedicated ‘Fly-under’ manoeuvre will be performed by ATV5 as part of the Laser InfraRed Imaging Sensor (LIRIS) demonstration.
The objective of LIRIS is to test a new suite of navigation sensors, namely visible infrared cameras and a lidar, which will allow future spacecraft to autonomously perform a rendezvous with uncooperative targets such as asteroids or incapacitated spacecraft. These sensors have been integrated onto the front cone of ATV5 as illustrated on the picture below.
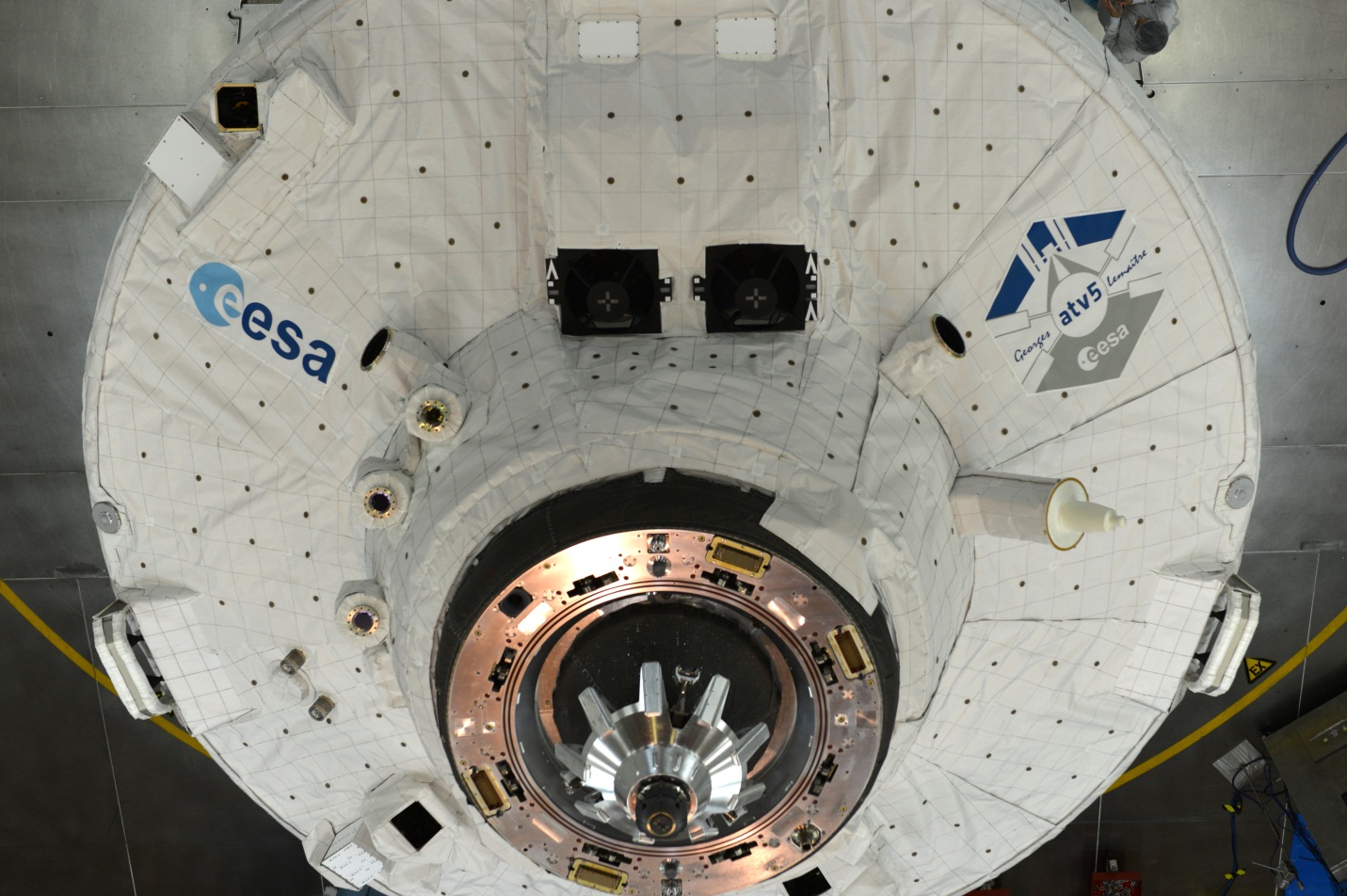
ATV5 front cone with LIRIS sensors just prior to Ariane 5 fairing encapsulation. Lidar: upper left side along the external diameter. There are three visible and Infrared cameras located around the docking cone on the left side. Credits: ESA
During the fly-under, ATV5 will drift below the ISS at a relative altitude of between 5 and 10 km, catching up with the ISS at a relative speed of about 45 km/h.
The LIRIS cameras will be activated after ATV5 has reached the proper orientation to ensure that the Station is within the LIRIS camera field of view.
The long-range capability of the infrared cameras will be tested during this manoeuvre, together with the capability to perform measurements both in daylight and eclipse conditions. Indeed, on Low Earth Orbit such as the ISS orbit, spacecraft are typically in eclipse for about 25min every 90min and hence navigation sensors must be able to work continuously, independent of lightning conditions. Images captured by LIRIS cameras will not be processed by ATV but stored on board in dedicated recorders that will be later returned to ground for analysis.
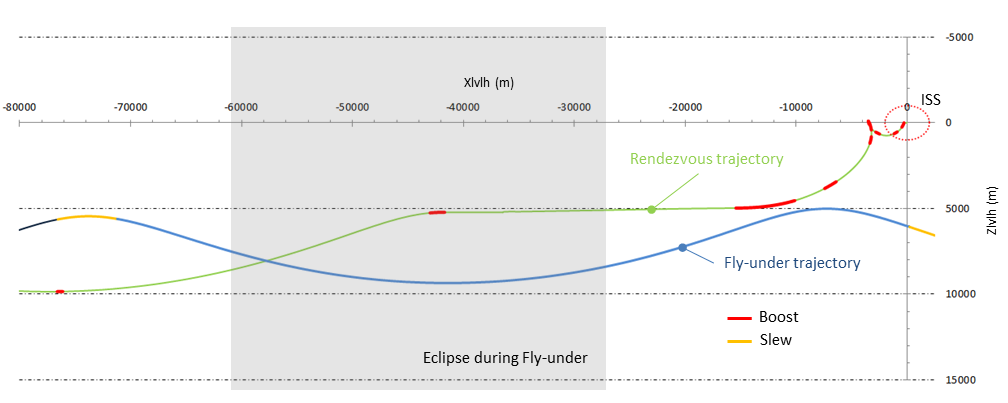
LIRIS demonstration orbit path for ATV-5. . Credit: ESA
Once ATV5 has passed vertically below the ISS, the LIRIS cameras will be switched off and ATV will return to its Sun-optimized orientation to maximize the power generated by its solar arrays.
A series of manoeuvre will then be commanded by ATV-CC over the following thee days to bring ATV into readiness for rendezvous and docking on 12 August.
 Automated Transfer Vehicle page
Automated Transfer Vehicle page ATV blog archive
ATV blog archive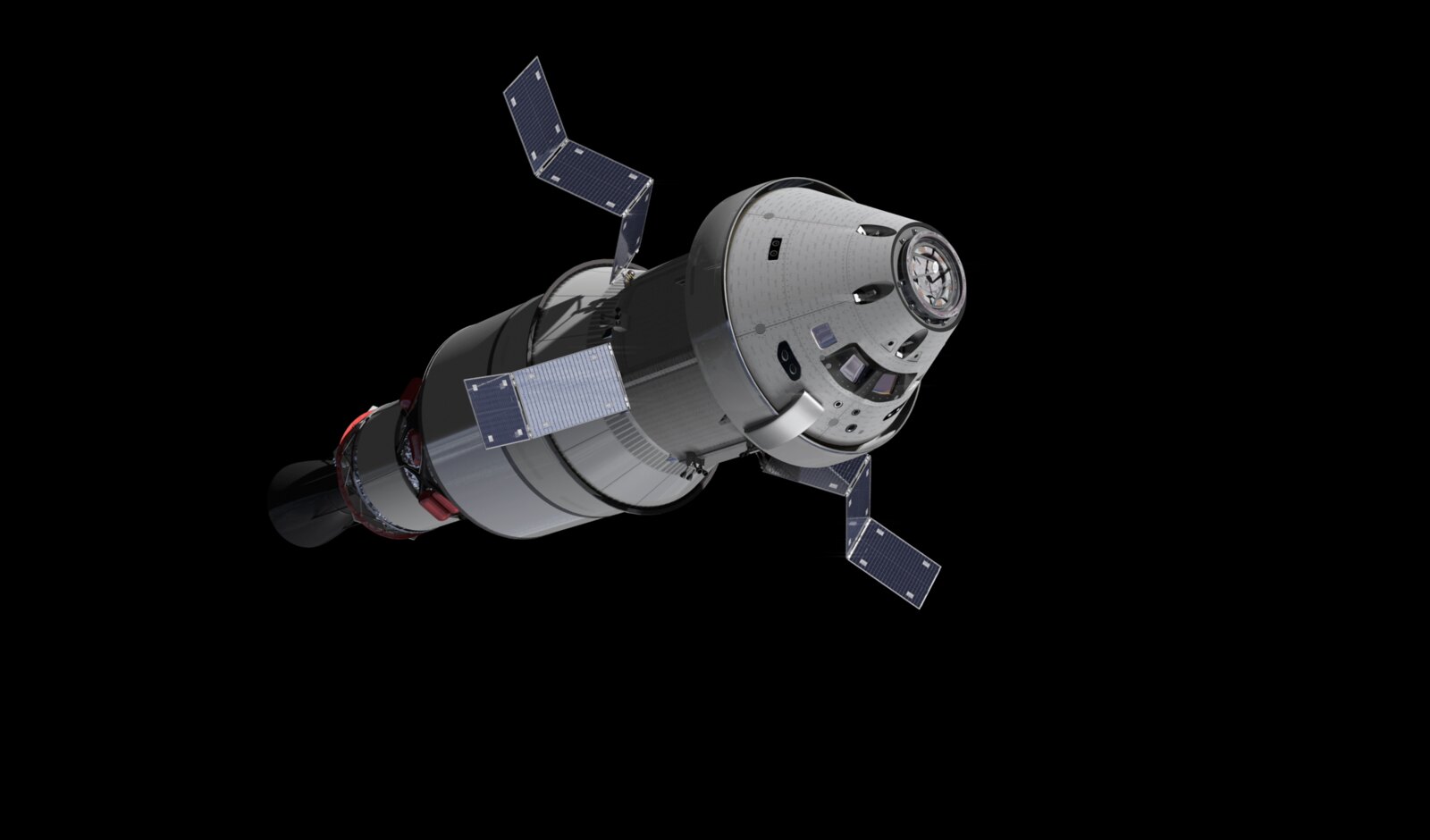
Discussion: no comments