
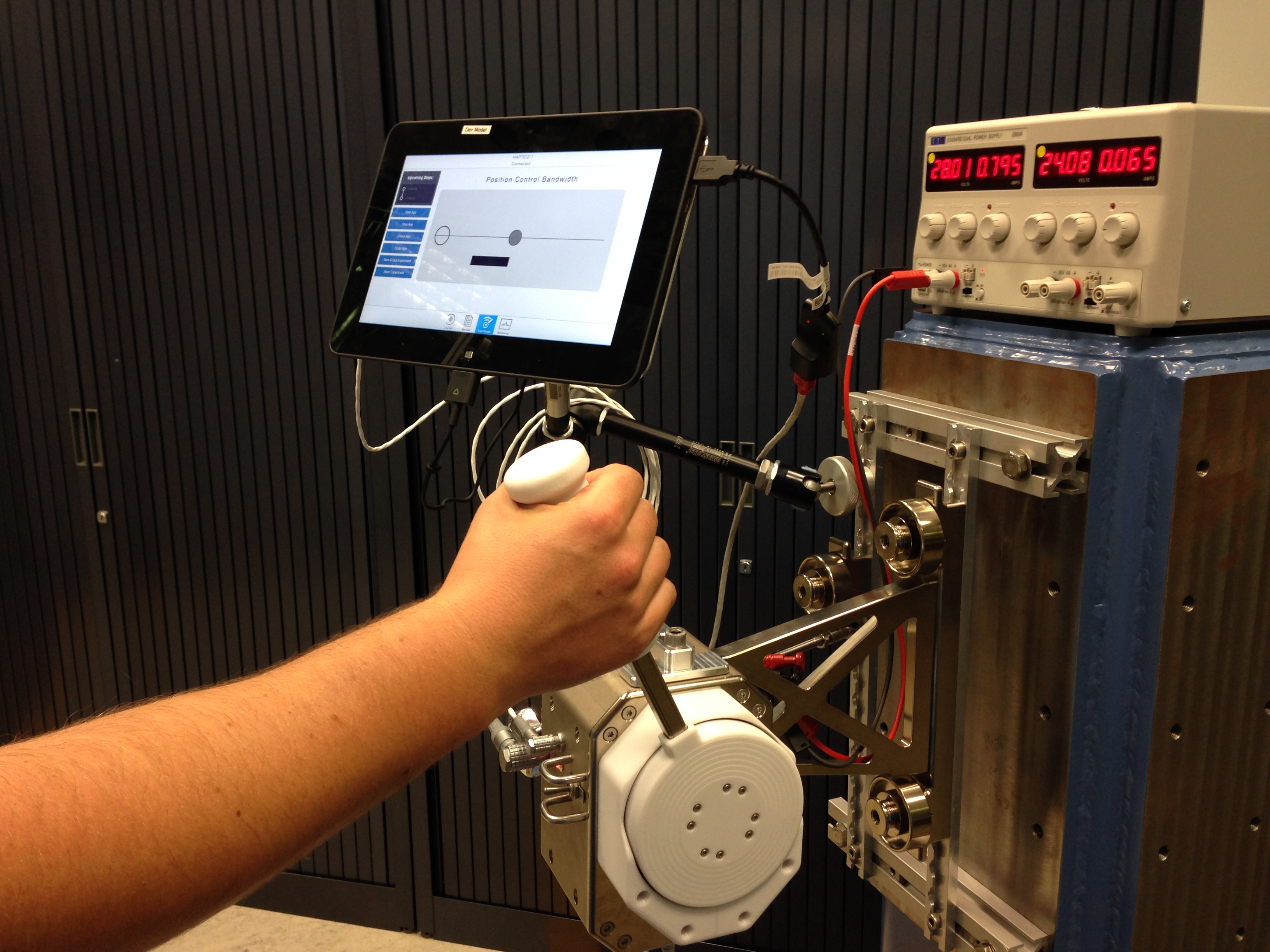
Haptics-1 body-mounted operations
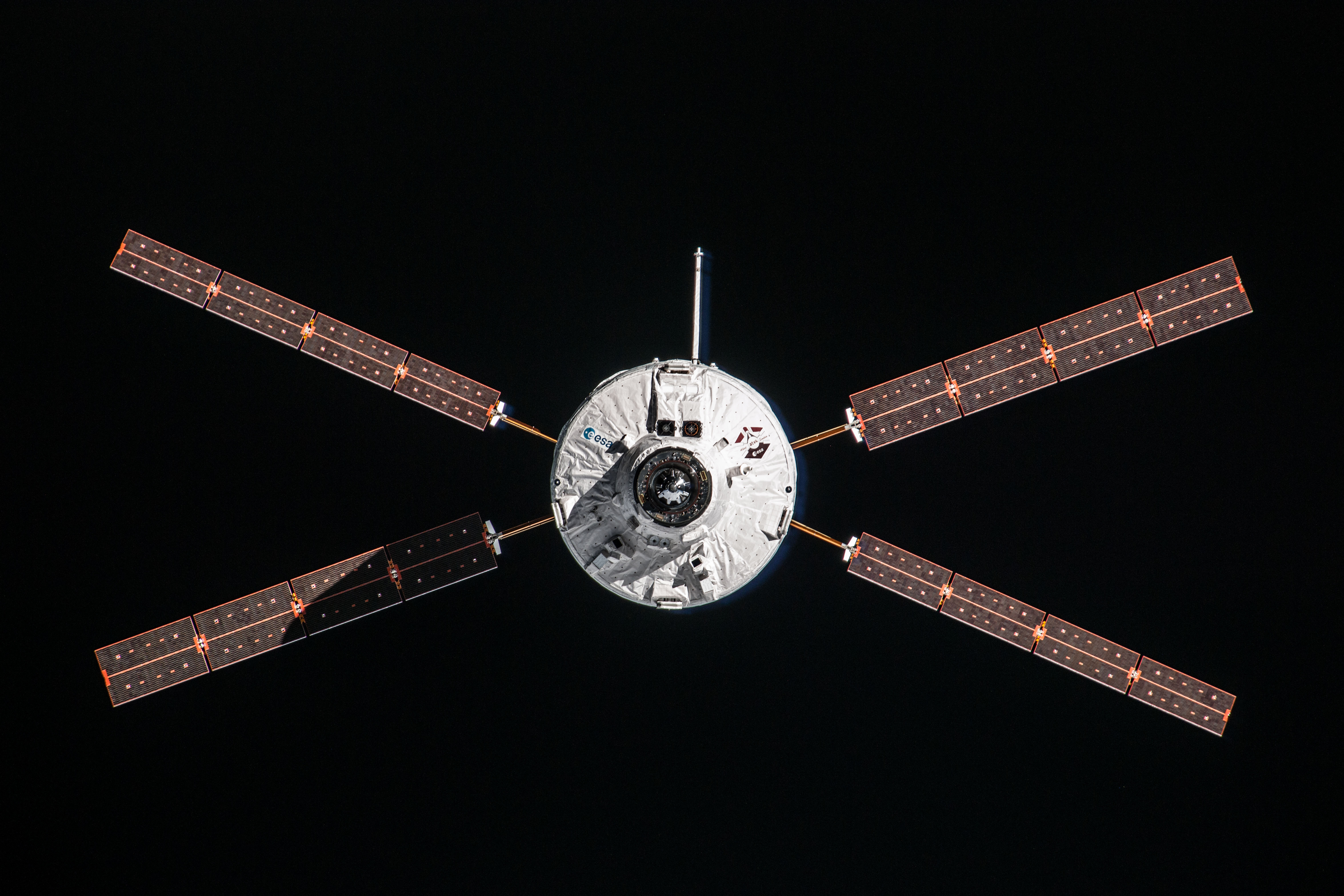
In one of ATV-5’s cargo bags is probably the most advanced force feedback joystick ever made: ESA’s spaceflight-certified hardware for the Haptic-1 experiment. Made by ESA’s telerobotics team, Haptics-1 is investigating remote-controlled robot operation and specifically how to make a human operator feel they are in a robots shoes, multi-purpose wheels, or lizard feet.
The telerobotics team are working towards bridging the gap between robots and humans. Future exploration of planets will most probably involve robots that are controlled by humans orbiting the planet above. The Telerobotics laboratory’s main contribution will be on human-robot interfaces.
Controlling machines from a distance – telerobotics – allows for the best of both worlds. Human being’s are unrivalled at adaptive quick-thinking while robots can perform specialised tasks and work in extreme environments. But controlling robots requires feedback of what the robot is doing, from a simple visual display to the more elusive haptic feedback. Your smartphone has a simple haptic feedback system, press certain keys and your phone vibrates, to provide feedback that the key was pressed.
Testing set-up
Haptic feedback is extremely important to determine how much force needs to be applied for a job. Most people can tie their shoelaces under a table without looking at their shoe, but try doing this on a cold winter night with numb fingers.
On a distant planet a robot needs to know how much force to apply when picking up rock for further analysis and installing complex equipment. With haptic feedback an astronaut controlling the robot could automatically adjust the force needed to grip the object remotely and thereby do very fine and precise tasks.
How does it feel like in space?
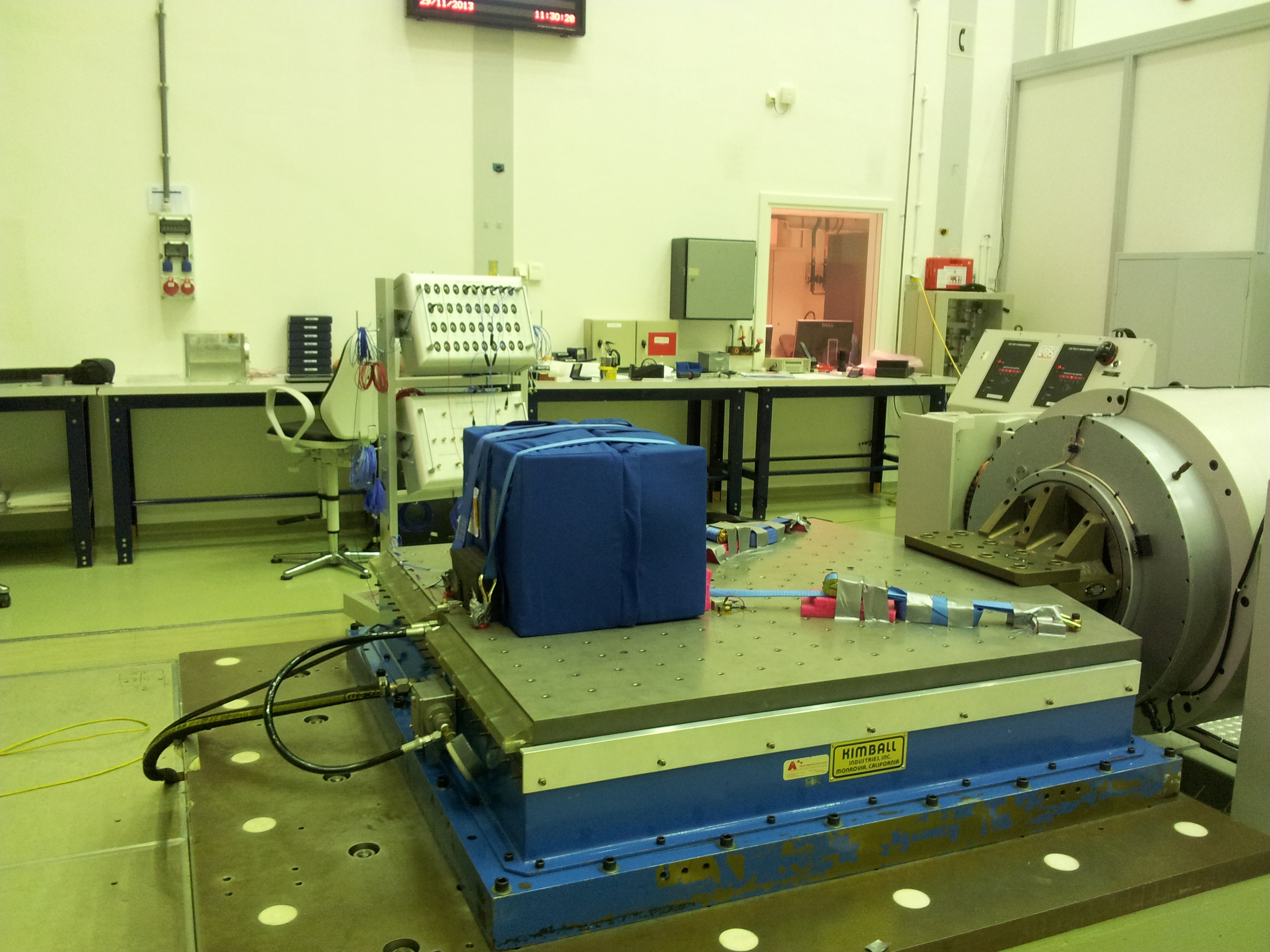
Shaker testing to ensure Haptics-1 can withstand launch on ATV-5
There is a glaring unknown to this future however: how will an astronaut experience haptic feedback in weightlessness? The Haptic-1 experiment will answer this question by testing haptic feedback with astronauts on the International Space Station.
A simple-looking lever can be pushed and pulled by an astronaut. Behind the scenes a complex suite of finely-tuned servo motors can recreate the smallest of forces while withstanding any force an astronaut could unleash on it.
“Getting the hardware to be extremely precise and incredibly sturdy was the main challenge of this project, we are very proud of the result” says André Schiele, head of the telerobotics lab and principal investigator I of Haptics-1. “The system can produce minute forces most people are not sensitive enough to feel, but astronauts could kick it and it will still work and respond correctly”.
The unit is self-contained, running off the 28 volt Space Station portable power supply with a small embedded computer doing all the control calculations. Connected to the haptics unit is a touchscreen tablet to load software and conduct the experiments. This is the first time a touchscreen-tablet will be used to control a robot from the Space Station and marks a new era of interactive experimentation, not only in space, but also on ground.

Test setup for radiated susceptibility test, high-frequency range, vertical polarization
Seven experiments are planned, although more are in the pipeline and can be uploaded easily to the system. Similar to the archetype computer game Pong, astronauts will move a bar on the tablet screen as quickly and precisely as possible under different feedback settings. Questionnaires will gather information on the minimum force they can feel and how realistic each setting feels. The scientific experiments will analyse in detail the motor control that humans have when exposed to microgravity for a long time.
In space every force needs to be countered or else the astronaut’s body would start to float away in reaction to the applied force. Without gravity providing an anchor, astronauts on spacewalks need foot restraints. For the haptics experiment the joystick is mounted via standard Space Station interfaces to a body harness. The harness is designed to work with all Space Station standard equipment fittings and is a first step to a new harness design for more advanced haptic devices that will be up-loaded at a later stage.
This is the first time haptic telerobotics are being done in space and there are many unknowns. Will the human body be more sensitive to forces in space? Will the same force and joystick settings on Earth feel natural in space? As André puts it: “I expect the unexpected”.
 Automated Transfer Vehicle page
Automated Transfer Vehicle page ATV blog archive
ATV blog archive
Discussion: one comment
Nicely done….
You might want also want to consider a new, lighter, more agile interface such as the one we have working on surgical robots. It can present the lightest touch (pulsatile tissue feedback) to the hardest material (steel or bone) without encumbering the astronauts (or surgeons) hands and will minimal to no kickback (low Newtonian force in low-G). It is so sensitive, small, and lightweight we have been able to perform simulated surgical procedures with a robot while blindfolded. Yes, touch ONLY with a robot.
https://www.youtube.com/watch?v=0WD9wpTxsag&feature=em-share_video_user
All the best. Love the work!
Ken