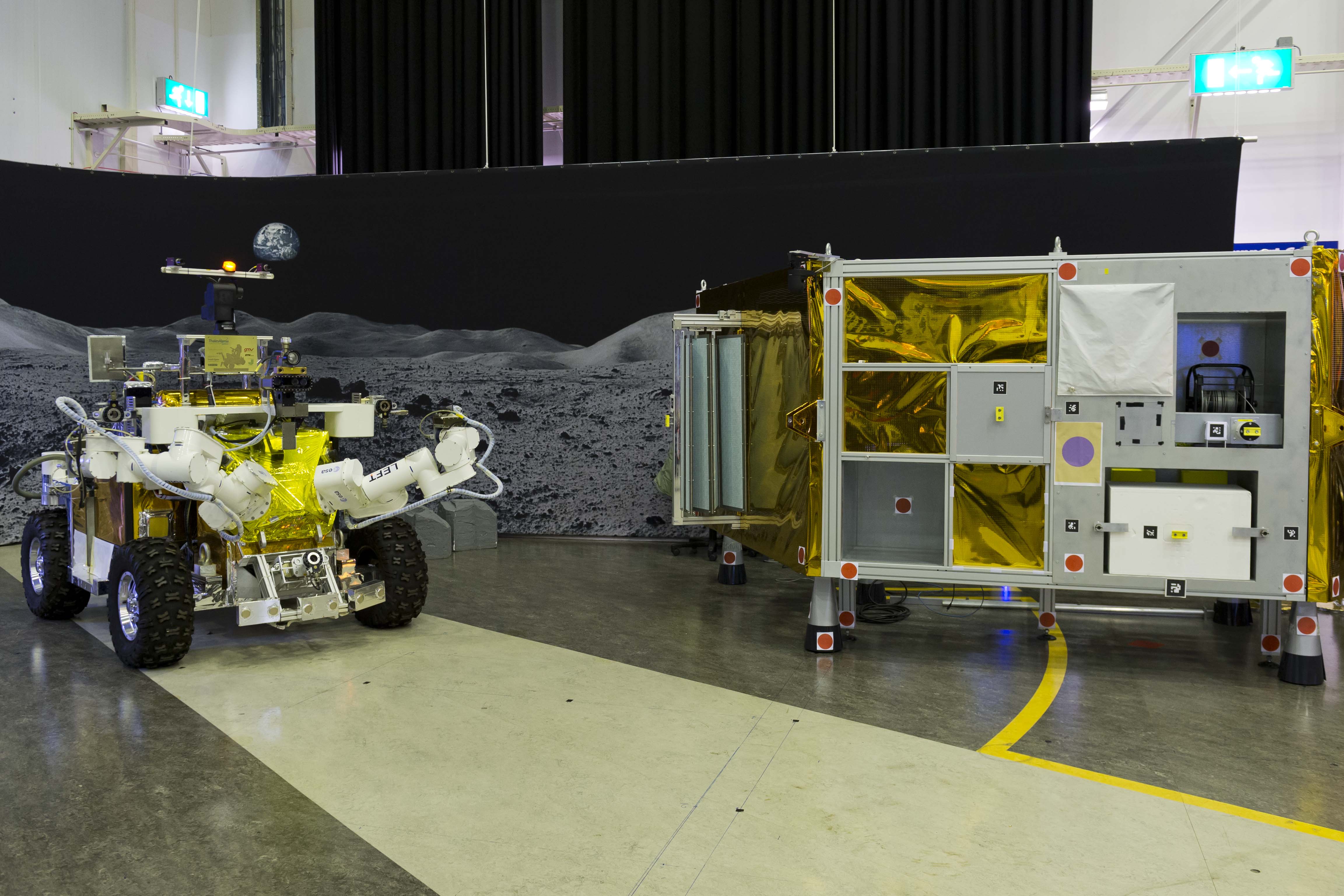
Eurobot rover and lander. Credits: ESA–A. Lefloc’h
How many times have you heard anyone, including yourself, questioning the usefulness of the subjects they teach in school? Probably hundreds of times – some subjects seem too academic to be used outside university walls and are dismissed and forgotten. In the Meteron project we are frequently putting our university degrees to the test however. We are constantly reminded of how crucial it is to keep your maths straight when it comes to robotics.
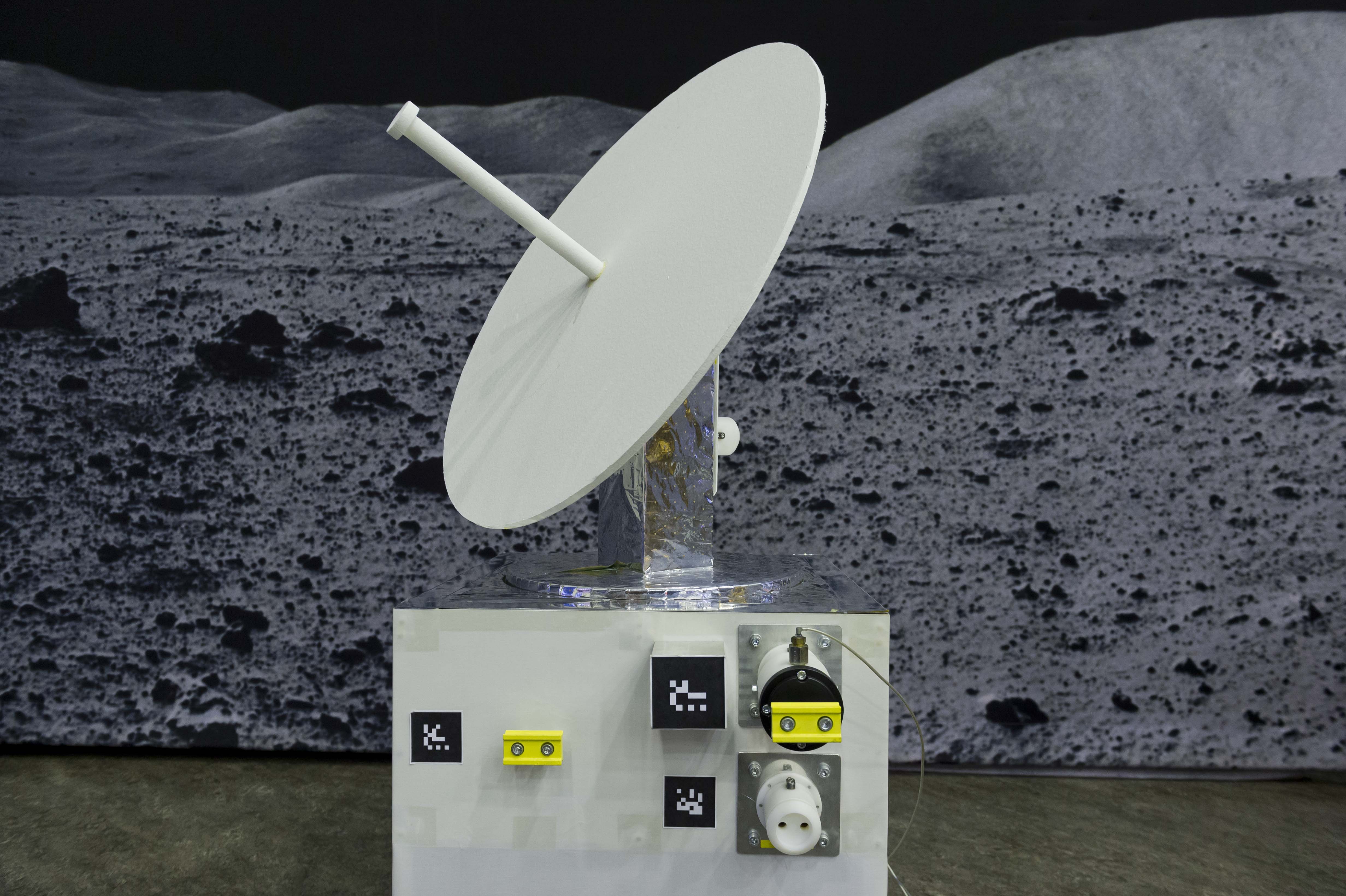
Antenna. Credits: ESA–A. Lefloc’h
A few weeks ago our work in ESTEC was focusing on reaching a clear understanding of how our rover – Eurobot – interacts with the world. It quickly becomes quite complex as each subsystem has its own reference system. Eurobot first performs a localisation procedure before grasping an object on the mock-up lander we have at our testing site. The localisation lets it know where it is located in relation to the lander in Cartesian coordinates. After that it calculates the location of the object we told it to grasp based on how the different subsystems relate to each other. Each subsystem is rotated individually in relation to the lander, which means that what is up, down, left and right, might not be the same for each system.
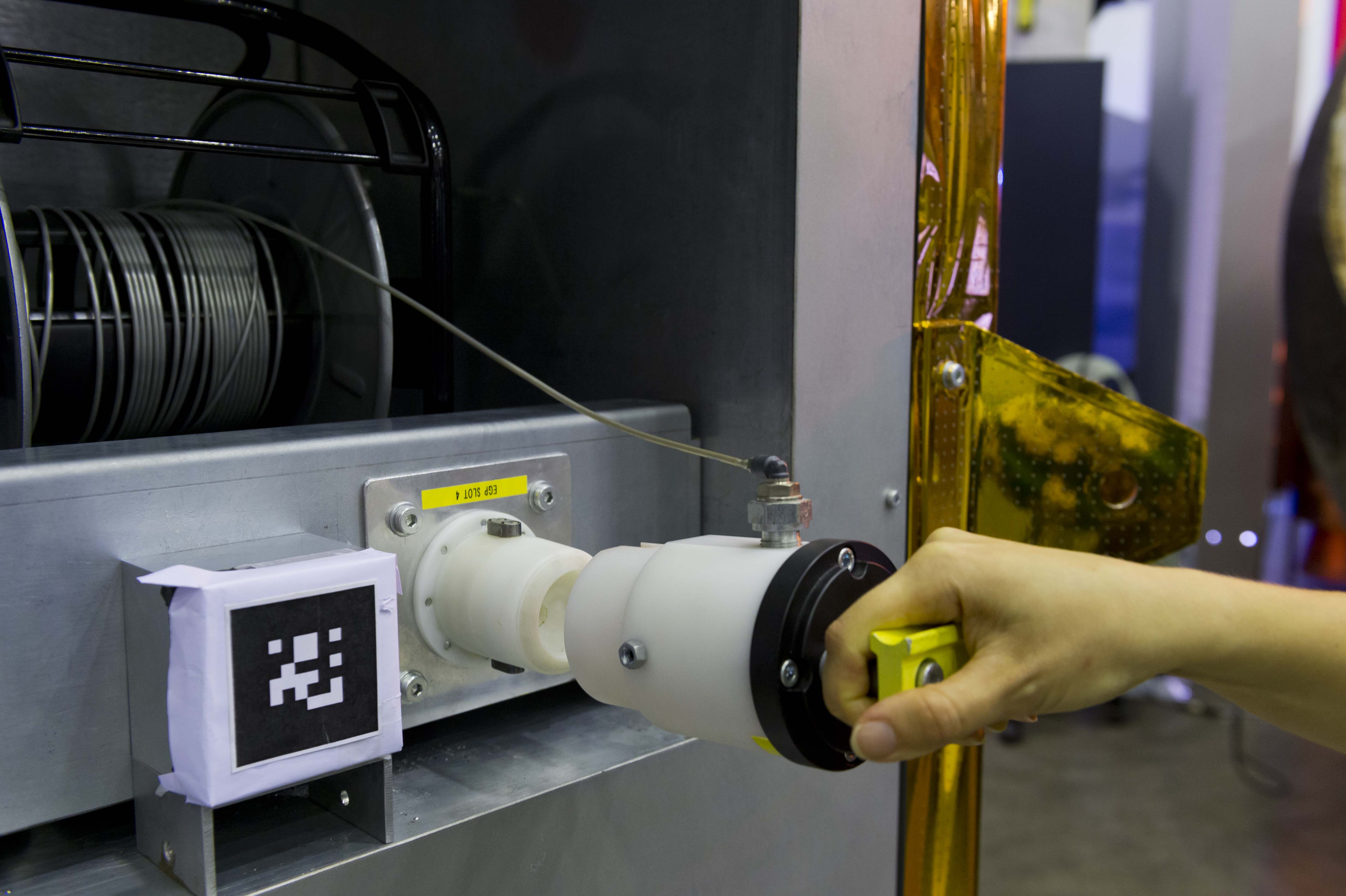
Object on the lander, we usually call this specific one the “lander connector”. Credits: ESA–A. Lefloc’h
Transformation matrices can be really confusing, to say the least. After some excellent support from another ESA project team and some Octave scripting, it made perfect sense for a while until we introduced a mock-up antenna into the test area. ESA astronaut Andreas Mogensen will deploy this new object by controlling Eurobot from space later this year. The antenna is rotated in relation to the lander and placed at a greater distance than any other item currently in our scenarios. This is what has caused us to take a step back to understand all the rover’s calculations to grasp items on the antenna. Most things work very well, but we need to reverse-engineer the rover’s calculations and spend some time on the theory again to understand why they actually work.
Marina Rantanen
Eurobot Engineer
Discussion: no comments