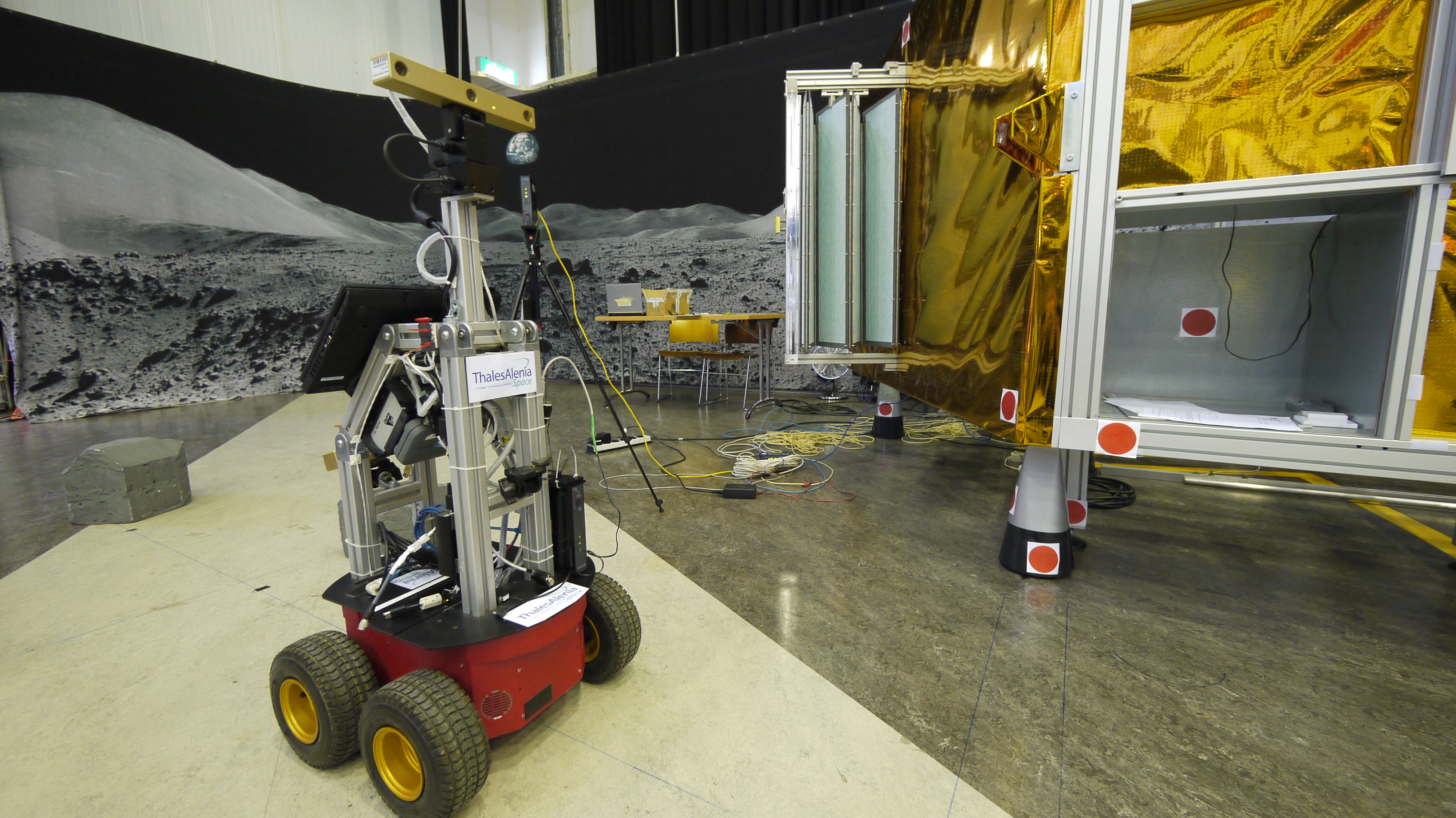
Surveyor rover at ESA’s technical heart ESTEC in The Netherlands. Credits: ESA–J. Harrod CC BY SA IGO 3.0
Update: the experiment has ended with JAXA astronaut Kimiya Yui moving the Surveyor rover expertly to inspect Eurobot. The experiment started a bit later than planned but Kimiya came back after a short break to finish. Watch the experiment in three parts via Paxi’s Periscope: https://www.periscope.tv/Paxi_ESAKids
Today the Meteron team will do another test with an astronaut on the International Space Station controlling a rover in The Netherlands, similar to what ESA astronaut Andreas Mogensen did two weeks ago. This time Japanese astronaut Kimiya Yui will drive the Surveyor rover to inspect the car-sized Eurobot from space starting 11:50 GMT (13:50 CEST).
Imagine an astronaut orbiting our Moon and controlling rovers on the Moon’s surface to build a lunar base. One of the rovers might get stuck in the dust and cannot move. The astronaut, in this test Kimiya, will need to see what the problem is to fix it. Today Kimiya will send a special Surveyor robot to Eurobot to have a look. The Surveyor can move around on the surface and has multiple cameras to send video back to the astronaut.

Eurobot at ESA’s technical heart ESTEC in The Netherlands. Credits: ESA–J. Harrod CC BY SA IGO 3.0
Today’s test is to see how well the computer interface works. Kimiya has not been trained for this task but will read a short introduction to the project before using two computers in Europe’s space laboratory Columbus to find out why Eurobot has stopped moving.
The Meteron team asked ESA kids mascot Paxi to help them and give Kimiya a nice surprise. Paxi will be hiding behind one of Eurobot’s wheels.
Driving a rover from a distance might sound easy, but the International Space Station is moving at 28 800 km/h, hundreds of kilometres from the Surveyor rover. When Kimiya sends a signal to the robot it has to travel up to satellites almost 36 000 km high and then down to a US ground station in New Mexico, via NASA Houston and then through a transatlantic cable to ESTEC – and back. Making the round-trip more than 144 000 km.
To share the experiment, Paxi will be streaming parts of the experiment live via his Twitter account @Paxi_ESAkids

Kimiya Yui looking at Paxi from afar. Credits: ESA–J. Harrod CC BY SA IGO 3.0
Discussion: no comments