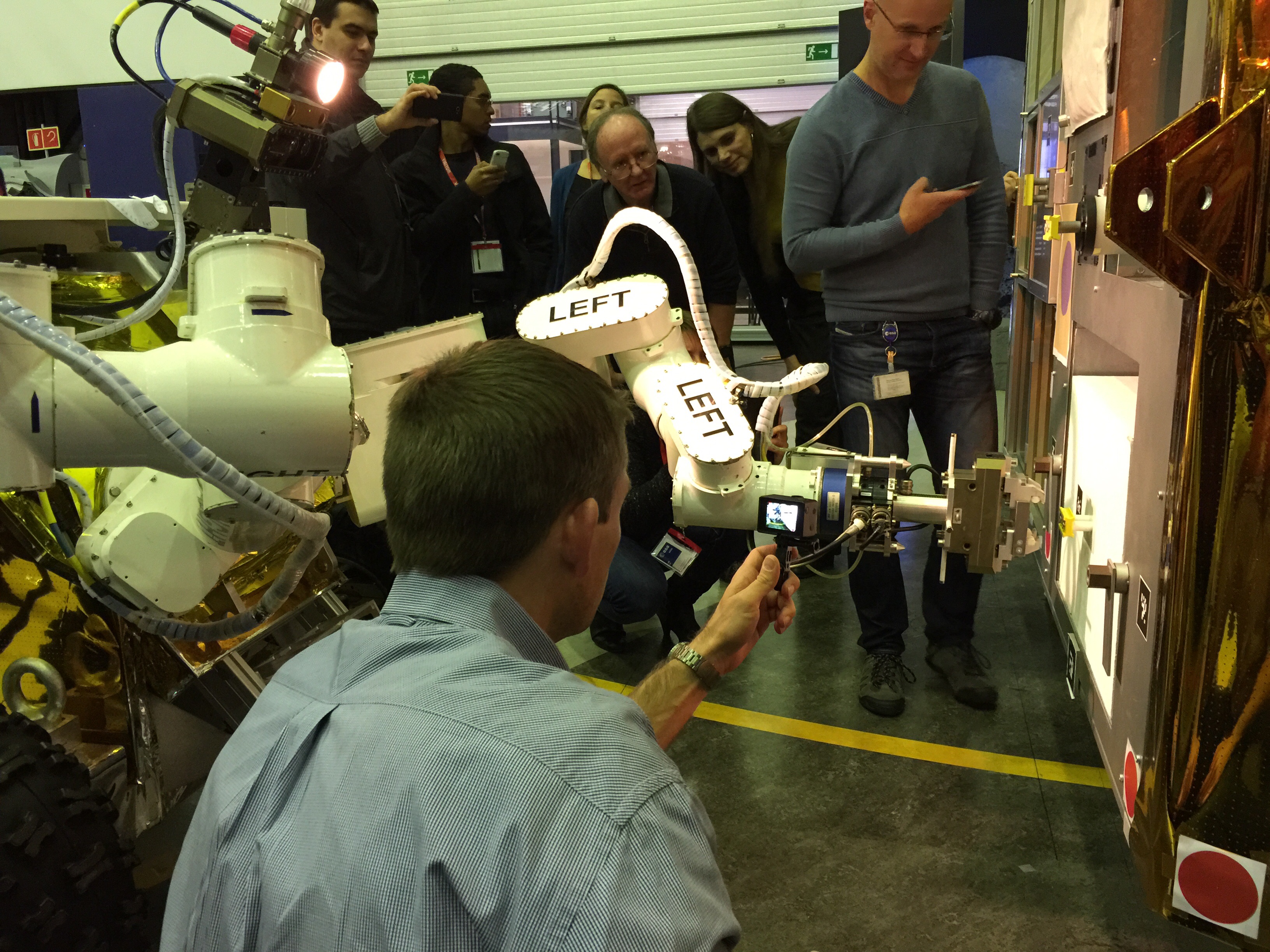
ESA astronaut Andreas Mogensen filming Eurobot demonstration. Credits: ESA-M. Rantanen
Eurobot is undergoing frantic testing now as we are preparing for a comprehensive telerobotic experiment that will take place in a few months. Danish astronaut Andreas Mogensen will control Eurobot from the International Space Station for an hour or two. This means that while he will be on orbit around Earth, he will be sending commands to perform complex telerobotic tasks at ESTEC in Noordwijk (If that’s not cool, we don’t know what is).
The idea is to have the experiment simulate scenarios as a rover like Eurobot would face on the Moon or Mars. The experiment will use another, smaller, rover that acts as surveyor and scout to ensure Eurobot can move safely and that Andreas has a good view of Europbot while performing the telerobotic sequences.
Andreas visited ESTEC in March to familiarise himself with Eurobot , we prepared a demonstration that included letting the rover perform a number of automated sequences. It would drive up to our mock lander, find an object, pick it up and then back away from the lander while holding the object. During the demonstration, most of our common errors occurred and we had to reset the system and start over a couple of times in front of the audience. It might sound like a disaster, but it was a good lesson for everyone involved. This showed what kind of problems we might encounter during the experiment and how we will recover from them.
In the end Eurobot grasped the box and backed away as planned. The whole event was interesting and makes you wonder how much you can actually prepare for failures. How do we make sure we cover all possible events to avoid surprises on experiment day, and when is enough enough? Andreas made a video of the event and interviews Eurobot systems engineer Bill Carey.
Testing of other planned robotic sequences now need to be finalised before we move on.
Marina Rantanen
Eurobot Engineer
Discussion: no comments