Editor’s note: Today’s blog post, contributed by Cluster Spacecraft Operations Manager Bruno Sousa, reports on a terrific initiative coming from the Cluster mission team at ESOC. They’ve checked out, tested and are re-commissioning the mission’s two Visual Monitoring (VMC) Cameras, one on board each of Rumba and Samba, which haven’t been used since launch 15 years ago. The small, ‘webcam’-quality imaging devices were originally intended to provide a simple, visual confirmation of separation from the launchers. Since then, they’ve been switched off and restarting them may provide some useful photos from orbit.
We’ve been working on something really special at Cluster, and we are rather enjoying it very much, as it’s not something we normally do. It all started after seeing a presentation in January by Simon Wood, one of the engineers behind the operation of the Mars Webcam. We were all very much impressed by the great outreach work they have done with the camera and at the end of the talk, the head of our operations division here at ESOC, Andrea Accomazzo, asked: “If Cluster has a similar camera, why hasn’t it been switched on?”
We answered that the reason was due to the fact that our cameras point steadily North from the ecliptic plane and, given our orbit inclination and the very small field of view (FOV), we would not see much – just black sky. Besides it hadn’t been used in almost 16 years, so we had no idea if it would work, especially after the intense radiation received since then by the spacecraft.

The only pictures ever taken with the VMC camera were during separation, just after launch, in 2000 by Rumba; Samba had a glitch at launch that prevented it taking photos. Credit: ESA
But the question was an interesting challenge (and a very useful team training opportunity) and, in fact, we were not very sure that the FOV would not ever view the Earth, as we’d never actually checked it out – and we just loved the idea that Cluster could acquire Earth images, as there aren’t that many spacecraft able to do so from the distances and orbits that the four Cluster spacecraft follow.
So, Charlie Amin, our Attitude and Orbit Control System (AOCS) engineer, immediately got to work digging out the camera technical manual to get the specs, find its exact location and orientation on board, and to learn as much as he could about the camera.
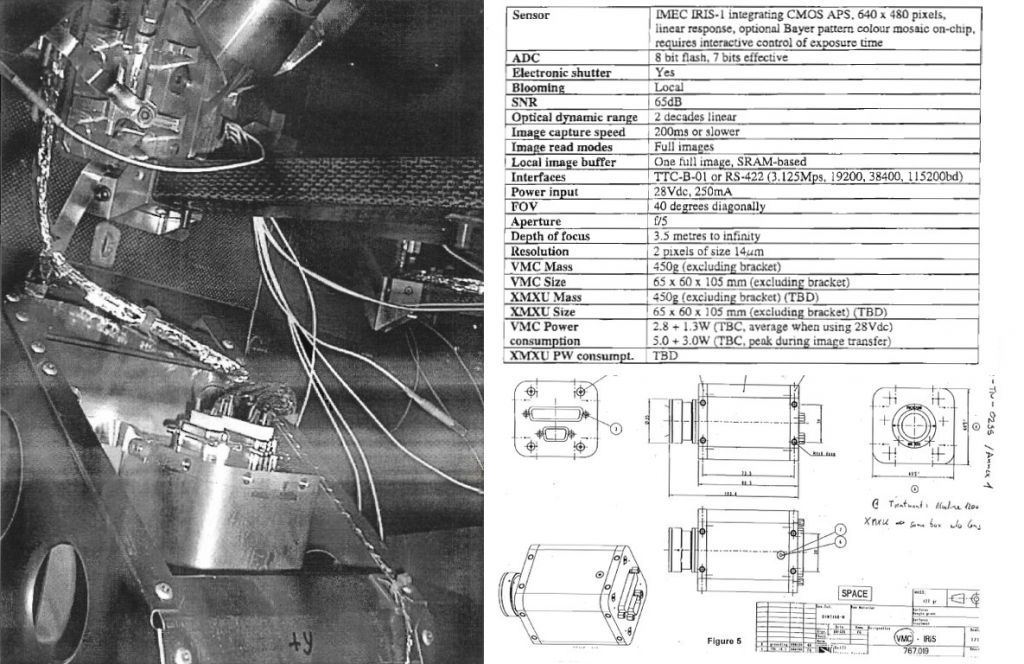
VMC camera specs from the user manual
Then he launched the orbit simulation tool, modelled the FOV into that and checked for intersections with Earth, i.e. checked to see if Earth would be seen by the cameras, in the near future.
Surprise, surprise! The tool predicted that we could just get a glimpse of the Earth from a short window in our orbit, basically any time in the coming months. This seemed sufficient to justify putting more effort into re-starting the 16-year-old devices.
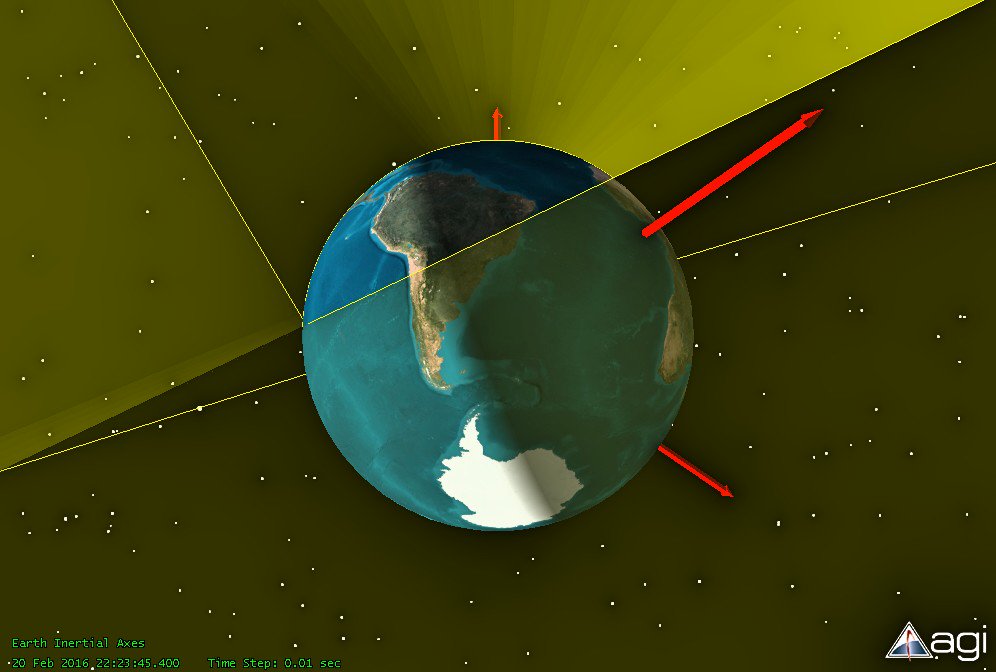
The VMC image, which is 640×480 pixels, would only catch a small glimpse of the Earth, but this is enough. This illustrates what the camera may be able to see on 20 February. Credit: ESA
So, next, we got out the old procedures that had been prepared for launch and we ran them through the simulator, adjusted them as needed and made sure to have graphics to monitor the relevant telemetry, and looked for a suitable opportunity to try it all with the spacecraft.
We had a good opportunity coming up, as eclipse season started on 13 February (that’s when part of the spacecraft’s orbit takes it into Earth’s shadow). During eclipses, Cluster switches off most of the payload and there would be enough power margin to test an old device that could play tricks on us.
We have two VMC cameras, one on Rumba and another on Samba, as these were the two upper spacecraft in their respective launches [the four-ship Cluster mission was launched in two dual launches – Ed.]. So we decided to take Samba, the one with the best power margins, and try it after our second eclipse, on the night of 16 February.

Giulio Pinzan, the Power and Thermal Engineer, Piergiorgio Pirroni, the Spacecraft Controller, and Charlie Amin, the AOCS engineer, ready to start the test. Credit: ESA
Our plan was to start the normal recovery of the spacecraft after an eclipse (we switch all four of them completely off during every eclipse because the batteries are dead) but then suspend the process in mid-step before switching on some of the non-essential loads so as to have a good, safe power margin of 75W – we were worried that, after 16 years, the camera may have defective electronics and could consume more than 50W peak, and we wanted to prevent the spacecraft rebooting unnecessarily because of insufficient voltage.
At this point, we would just switch the XMXU (which is the camera controller unit and the one most likely to produce any unwanted power surge) and let that run for a while to become stable. Then we would switch it off and switch the camera and XMXU on together, which would result in 27 images being taken automatically.

The moment that we commanded activation of the VMC camera to take the first images in almost 16 years. Credit: ESA
Then we would download the images to ground and repeat the test by enabling our external power dumper, thus subtracting 50W from our original power margin to see if the activation would cause this power dumper to autonomously switch off (which it does in case of over-current).
In this fashion, we could verify that the camera could also activate properly even with lower power margins. So, we did everything as described above and it all just worked perfectly.
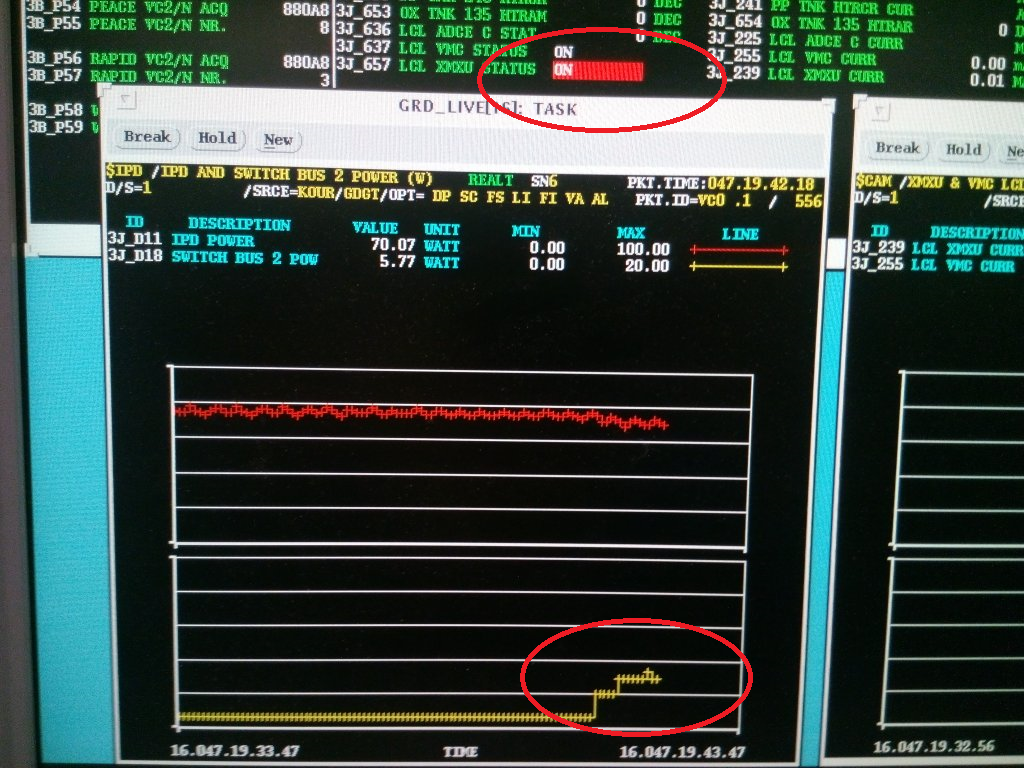
The moment when the camera and XMXU switched on, and started acquiring images. Credit: ESA
Now that we knew that the camera could be switched on without problem and do its work, the next step was to analyse the images to check their quality. Is the sensor damaged? Is the lens dirty? This is when we needed the help of Bill Fairclough, one of our Software Support specialists (and who was working on Cluster at the time of the launch), to extract the image files from the telemetry data stream and convert them to RAW images (a standard image format).
Bill made a few attempts at formatting the files and then sent us several samples to check. We passed these samples through the processing tool developed by our colleagues over at Mars Express to convert that mission’s VMC camera’s RAW images to PNG files.
Then, finally, after 16 years, we could review the images – the first one was all black but we were happy because it seemed to indicate the sensor is clean and undamaged, and then… voilà!
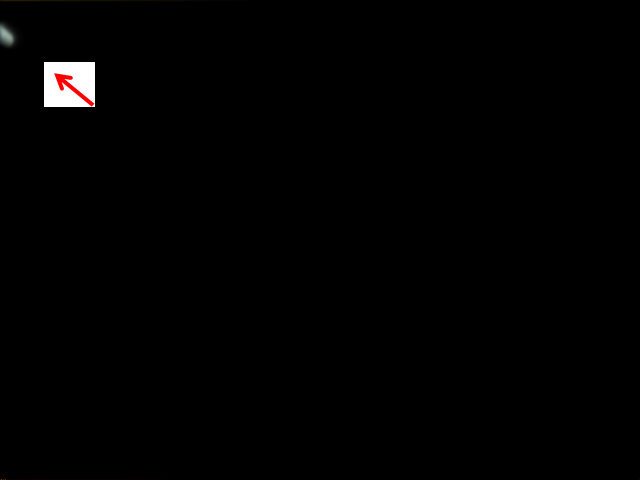
We were expecting only black photos but then this creeps in – see the top-left corner in the field of view Credit: ESA
It took us a few minutes to realise what we were looking at; our first thought was: “Hey, look – some stray light.” But by reviewing consecutive images we saw the same feature in the same position with different illumination intensities, and it looked, well, ‘roundy’.
We certainly didn’t expect the Earth to be there, and if that was the Earth then it would be a bit disappointing, as we were expecting a bigger disk and better quality. We did the math again and confirmed it couldn’t be our planet, so what could it be?
And then it struck us! Of course!
It was the No. 2 Low Gain Antenna, which we also call the South Antenna! We had originally decided to call this campaign #VMCSouthPole – because we would eventually be shooting the Earth from below. But what we didn’t expect was to actually shoot our own ‘South (antenna) Pole’ and at the same time succeed in creating a selfie of Samba on our very first attempt at using the camera!
When the original VMC images were taken after launch, the antennas had not been yet deployed, but since then, they have of course been extended and one of them points vertically in the same direction as the camera and pokes out in front of it! The varying light intensity is caused by the spin of the spacecraft. That’s how we now know the camera is in perfect operating condition! And now we also know how the field of view is oriented with respect to the spacecraft body, and we can get a feeling for where the Sun is at any given moment. Now it’s time to catch a glimpse of the Earth…
Watch this space very soon!
Discussion: 3 comments
Love it! The appliance of science
Great! Wonderful.
It’s fantastic to see this stuff is still working after so many years! Just like the VMC “Mars webcam” on orbit around Mars.
https://www.planetary.org/multimedia/space-images/earth/whirling-earth-from-spinning-samba.html