 In January 2011, during ATV-2 mission preparations, our colleague Fabien over at CNES’s ATV blog posted an update entitled: Do you speak ATV? – a rather tongue-in-check look at the complexities of ATV-related terminology in French.
In January 2011, during ATV-2 mission preparations, our colleague Fabien over at CNES’s ATV blog posted an update entitled: Do you speak ATV? – a rather tongue-in-check look at the complexities of ATV-related terminology in French.
This got us to thinking, however: ATV is a sophisticated vessel – and keeping track of all the engineering and mission-related techno-babble can sometimes be tough as rocket science. 🙂
So we dropped a note to Adam Williams, an experienced operations engineer at ATV-CC in Toulouse (he’s been responsible for training the joint ESA/CNES there), and asked him to help us put together a glossary that clarifies the most important terms in – we hope – plain language.
Just in time for launch, here it is: The ABCs of ATV – and if anything is still not clear, do not hesitate to contact us with your questions (you can also post a query at the bottom of each blog update – click on the title to view).
The ABCs of ATV
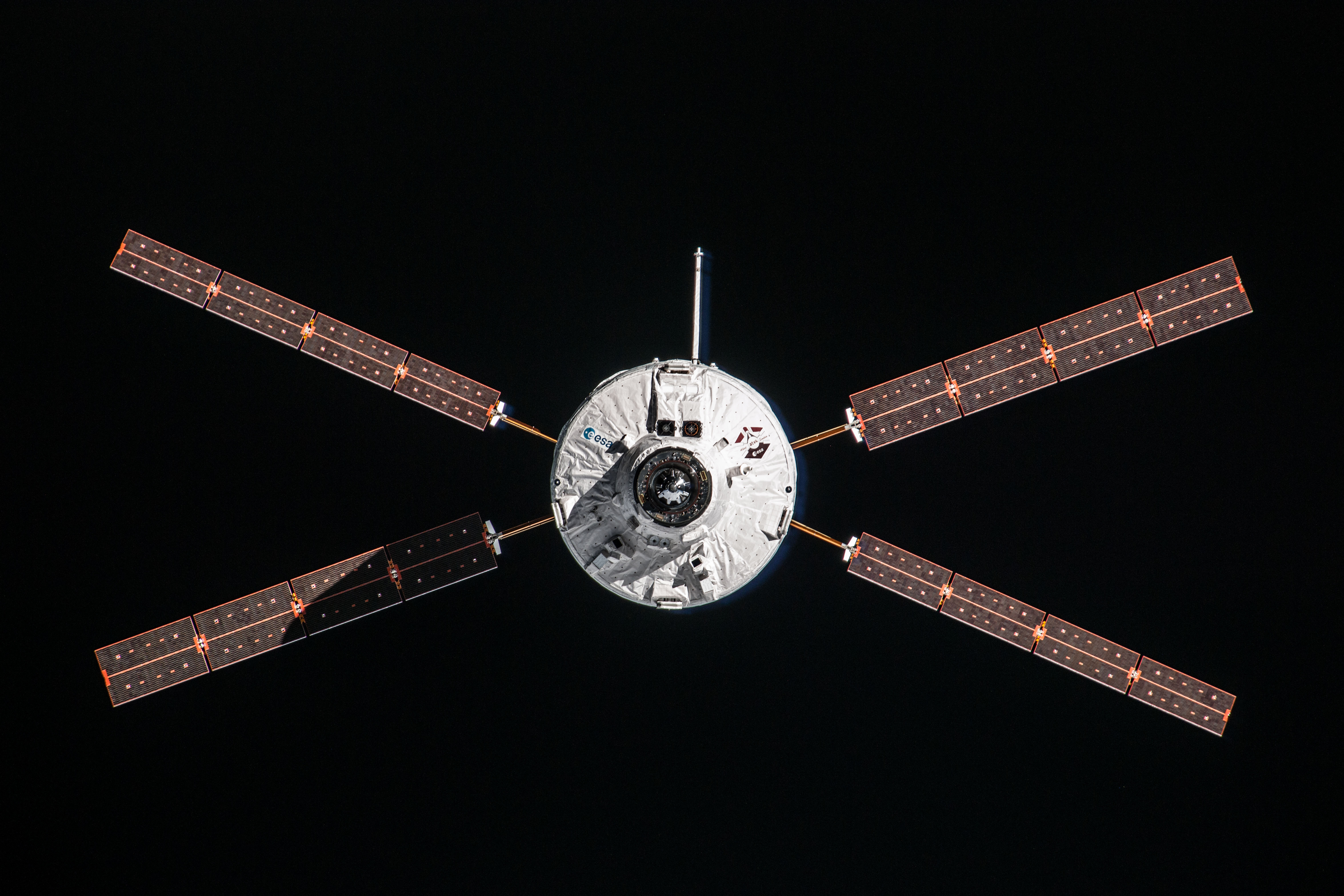
ATV – Automated Transfer Vehicle: Any one of a series of European cargo vessels that ferry supplies to the ISS. The first one, Jules Verne, flew in 2008. The current vessel, Johannes Kepler, goes to station February-June 2011. The third, Edoardo Amaldi, will fly in 2012.
Flight segment: Another term for the ATV spacecraft – think of the vessel as a ‘system of systems’ that is simply an extension of the ‘ground segment’, with the two interconnected by radio.
ATV-CC – ATV Control Centre: The technical centre in Toulouse, France, from where all ATV missions are controlled. ESA and CNES engineers at ATV-CC manage mission operations, send commands to ATV and receive data and telemetry from the vessels. ATV-CC is housed in a building located at the Centre spatial de Toulouse (CST), an establishment of France’s Centre National d’Etudes Spaciales (CNES) – the French space agency.
MCC-M – Mission Control Centre – Moscow: The Russian mission control centre (Russian acronym ЦУП ‘TsUP’) that controls the Russian portion of the ISS, located at Moscow, Russia. MCC-M gives a final GO/NO-GO authorisation for ATV to dock to the Russian module of the ISS.
MCC-H – Mission Control Centre – Houston: NASA’s ISS control centre, which is known as ‘Houston’ on the ISS operations voice loop. It is based at the Lyndon B. Johnson Space Centre, in Houston, Texas. It manages all manned spaceflight for NASA; it also controls the US portion of the ISS.
Roscosmos – Russian Federal Space Agency: Also abbreviated as FKA and RKA; is the Russian government agency responsible for the Russian space science program and aerospace research. Headquarters of Roscosmos are located in Moscow. The agency controls the Russian portion of the ISS.
CSG – Centre Spatial Guyanais: Europe’s Spaceport is located in Kourou, in the northeast of South America in French Guiana, an overseas department of France. Kourou lies at latitude 5°3′ North – a mere 500 km from the equator. This makes it ideally placed for launches into geostationary transfer orbit as few changes have to be made to a satellite’s trajectory. And all launches – including those of ATV – also profit from the ‘slingshot’ effect from the energy created by the speed of the Earth’s rotation around the axis of the poles. This increases the speed of a launcher by 460m per second. These important factors save fuel and money.
Mission Director – several of them: These are the ESA experts working at ATV-CC who oversee various aspects of mission operations. They also interface with the international ISS partners (namely, NASA and the Russian space agency) and manage the Flight Control Team (see below), who are provided by CNES, the French space agency. Each ESA mission director is specially trained in a specific aspect of ATV operations or a specific phase of the mission. The lead mission director is the overall ‘boss’ for operational matters at ATV-CC. The ESA mission directors work very closely with the CNES flight engineers and spacecraft controllers, and in practice there is no distinction made between ESA and CNES personnel – mission operations are conducted by a single, large, tightly integrated and highly coordinated ATV team.
Flight Control Team: Provided by CNES (Centre National d’Études Spatiales – France’s space agency). CNES provides a range of technical experts – flight engineers, flight dynamics specialists, spacecraft controllers, systems engineers and many others – who work directly for the mission director.
Flight dynamics: Another term for ‘rocket science’ – flight dynamics is a highly complex art practised by very smart folks – scientists and engineers – who do amazing things like figure out where ATV is located – to the centimetre – and where it has to go – and when it has to get there. They calculate all the thruster jet ‘pushes’ or manoeuvres needed to get it into the correct orbits for meeting up with or departing from the Station, and they even know in which direction ATV is pointing. Which is quite a trick considering that no one can actually see ATV until it gets near to the ISS. They worry about solving Einstein’s, Newton’s and Kepler’s complex, three-dimensional equations so that flying ATV looks easy – but it really isn’t.
On console: Sitting on console is what flight engineers and ATV specialists do in order to monitor and control the spacecraft, spending long hours in the ATV-CC main control room, the flight dynamics room or the industrial support room in front of a computer workstation – or console – that is connected to ATV’s ground and flight segments.
Manoeuvre: Any time ATV has to change its orbit or altitude, it must fire some of its thrusters in a certain direction for a certain amount of time. This push provides the desired change, and the precise timing must be carefully calculated beforehand by the Flight Dynamics Team at ATV-CC.
Cargo: What ATV carries. This is split into two main types – dry cargo and liquid cargo. ‘Liquid’ cargo comprises the fuels (ATV’s own propellent and propellent to be transferred to the ISS), water and gases (air and O2) to be used in orbit, while the dry cargo comprises everything else.
In general terms, this includes food, flight crew equipment, crew personal items, EVA equipment, spare computers & computer parts (e.g. hard drives), Station utilisation equipment (typically, items used in microgravity and biolife experiments) and vehicle hardware (spare parts, etc.). ATV also carries individual experiments, such as the Reentry Breakup Recorder (REBR).
Late-load cargo: The cargo loaded after the two halves of the ATV – the Integrated Cargo Carrier (ICC) and the avionics carrier – have been joined together; the ICC at that time has already been packed with most cargo. From that time on, everything that is to be added has to be laboriously lowered through the hatch into the interior for stowage.
On the one hand, it would be nice to have all cargo ready to go prior to assembling the two halves; on the other hand, time = flexibility, and being able to load ‘late’ or last-minute cargo delivered from NASA or one of the ISS partners provides maximum flexibility and the ability to react to last-minute requirements. Service is what ATV is all about.
Ariane 5 ECA – ATV’s super-powerful launch vehicle: The latest version of the Ariane 5 launcher, Ariane 5 ECA, is designed to place payloads weighing up to 9.6 tonnes into GTO. With its increased capacity, Ariane 5 ECA can handle dual launches of very large satellites. It’s up to 53m tall, up to 5.4m in diameter and has a lift-off mass of 780 tonnes. In February 2011, Ariane 5 ECA flight v200 lofted ATV Johannes Kepler into orbit – Europe’s heaviest-ever payload, at 20 010 kg.
LEOP – Launch and Early Orbit Phase: One of the most critical mission phases starting with launch and ending when ATV is safely operating in its initial orbit. Every mission controller will sweat through LEOP because a number of crucial actions have to happen in the right sequence and at the correct time: the Ariane fairings – the aerodynamic pointy bits at the tip – must be jettisoned, the Ariane launcher has to inject ATV into the correct orbit, ATV and the second stage of Ariane have to separate from the main launcher, the second-stage booster must fire its engine twice to push ATV into the correct elliptical orbit, the booster must be jettisoned, ATV must start transmitting signals back to ground, and ATV’s four solar arrays must automatically deploy. And that’s just the start of LEOP!
Phasing: Once LEOP is complete and ATV is safely in its first routine orbit, it must conduct a series of manoeuvres to bring its orbit into synchronisation – or into ‘phase’ – with that of the ISS. Phasing manoeuvres are a set of thruster burns designed to take ATV from its injection point to a point around 40km behind and 5km below the ISS, ready to start rendezvous operations.
Injection point: The point in space where Ariane 5 completes its delivery of ATV into orbit (see LEOP).
Separation point: The point in space where ATV is detached completely from Ariane 5 and becomes an independent vessel in space (see LEOP).
Ground segment: The overall hardware, software and networks on the ground used to operate the spacecraft in orbit, send commands and receive telemetry. The ground segment inter-operates with the hardware and software on board ATV (see ‘flight segment’) via the communication links. Think of it as just one big ‘system of systems’.
Telemetry: Radio signals received from ATV contain telemetry – essentially data that report the status of ATV’s systems and the overall health of the spacecraft. Telemetry are used by the Flight Control Team to understand what’s happening on board and to plan future command sequences to be sent to the spacecraft.
Commands (or Telecommands): Despite the fact that ATV is highly intelligent and can conduct many activities (including the critical ISS docking) on its own, mission controllers on the ground do have to send some specific commands. Typical commands include telling the vessel to conduct a manoeuvre to avoid space debris, to change its orbit to match that of the ISS prior to rendezvous, or to fire its thrusters to slow down and start re-entry.
TDRSS – NASA’s Tracking and Data Relay Satellite System: A set of communication relay satellites in geostationary orbit. At least one is always in view of ATV and the ISS, and can relay signals to and from ATV via a network of ground stations on Earth.
Artemis: ESA’s own data relay satellite, which is in geosynchronous orbit like NASA’s TDRSS relay satellites. It provides communication relay services when ATV is attached to the station (when the station/ATV are in view) and can also be used in a pinch when ATV is in free flight.
Communication link: Actually, there are several of them – radio links are used by mission controllers to communicate with ATV.
- The first link is provided by NASA’s Tracking and Data Relay Satellite System (TDRSS), a set of communication relay satellites in geostationary orbit. At least one is always in view of ATV and the ISS, and can relay signals to and from ATV via a network of ground stations on Earth. During critical portions of the mission, like docking, ATV is in continuous contact with the ground.
- The second link is provided by ESA’s own data relay satellite, Artemis, which is also in geosynchronous orbit. However, it normally provides communication relay services only when ATV is attached to the station, and then only when the station/ATV are in view – although this can be used to communicate with ATV in free flight.
Proximity link: There’s also a communication link that enables direct contact between ATV and the ISS. It consists of a receiver/transmitter unit on board the Russian module of the ISS matched with a second unit on board ATV – you can see the long antenna pointing out from the side of ATV in some photos. The proximity link is used by the astronauts to monitor the status of ATV during docking.
Back-up proximity link: An ingenious method of using the proximity link on board ATV (initially designed only to communicate with the station) to communicate directly with the ground, providing an additional redundant way to control ATV before or after docking. The proximity link on ATV can communicate directly with ESA’s 15m ESTRACK ground stations in Maspalomas or Villafranca, Spain, and Redu, Belgium.
Redundant: All critical systems on board ATV are redundant – meaning that there is a second (or third, or even fourth) copy of the physical hardware and software that carry out any specific function. For example, the ATV propulsion system has both main and redundant thrusters to power it during docking with the ISS. In case both the main and redundant thrusters fail, it has a completely separate, alternative thruster system, controlled by completely different hardware and software.
Rdv – Rendezvous: Once phasing is complete, rendezvous marks the arrival of ATV in the vicinity of the ISS – at a specific point in space – designated S-1/2 – approximately 39 kilometres behind and 5 kilometres below the ISS. From this point, mission controllers will command ATV through a series of way-points getting progressively closer to the station, until, at certain point, S2 – 3.5 km behind and 100 m below the station, ATV begins its automated docking sequence.
HOLD: In case of some anomalous situation, ground controllers or the ISS crew can command ATV to stop approaching the station using the HOLD command.
RETREAT: If necessary, ground controllers or the ISS crew and command ATV to move away from the ISS (and can later RESUME the approach).
ESCAPE: In case of major problems, don’t panic! Ground controllers, the ISS crew, or ATV itself, can command ATV to manoeuvre away and then below the ISS, moving to a safe point many kilometres away from the ISS.
ABORT: If an ESCAPE has been commanded, but is not being performed correctly, then ground controllers, the ISS crew, or ATV itself, can command an ABORT, which causes ATV to use a completely independent set of sensors, thrusters and software to manoeuvre safely away from the ISS.
Docking: What ATV does best – and all by itself. Using a European-developed system of GPS- and laser-based sensors combined with some very fancy software, ATV senses exactly where it is in relation to the docking port in the Russian Zvevda module of the ISS and guides itself to contact with gentle thruster pushes (it contacts the station at just 7 cm/second). The astronauts on board the station and mission controllers can watch it all happen via a live video feed, and either can command ATV to HOLD, RETREAT, ESCAPE or ABORT if anything goes wrong. So far, none have had to (except in practice) and ATV has simply docked itself without much fuss.
Attached phase: The longest mission phase, lasting several months, when ATV is docked with the station. ATV serves as an integral portion of the station’s interior, and astronauts enter it regularly to obtain supplies, transfer gases or fuel to the ISS’s main tanks or simply to take a break. ATV’s thrusters are also used during this phase to reboost the ISS, which steadily sinks in its orbit due to the minute amount of atmospheric drag and must be boosted back up every so often. ATV can also boost the station to avoid any predicted conjunctions – collisions – with space debris.
Reboost: See Attached Phase.
DAM – Debris Avoidance Manoeuvre: Very similar to a reboost, except done exceptionally to avoid a predicted debris ‘conjunction’ – just a fancy word that engineers use to describe what happens if two orbiting items arrive at the same place in space at the same time. Regular folks just call it a ‘collision’.
Undocking: That’s when ATV detaches itself from the ISS at the end of its mission – after being emptied of cargo and filled up with Station waste (the waste can be solid, or liquid… use your imagination…). It then manoeuvres away from the ISS under its own power, and spends one or two days in free flight before re-entry.
Re-entry: When mission controllers command ATV to fire its engines to slow down, sink lower in its orbit and start re-entering Earth’s atmosphere. This is usually done in two manoeuvres, and, after the second one, ATV re-enters about 45 minutes later. It burns up in the atmosphere and whatever fragments that survive re-entry fall harmlessly into the Pacific Ocean, a long way away from anyone or anywhere.
 Automated Transfer Vehicle page
Automated Transfer Vehicle page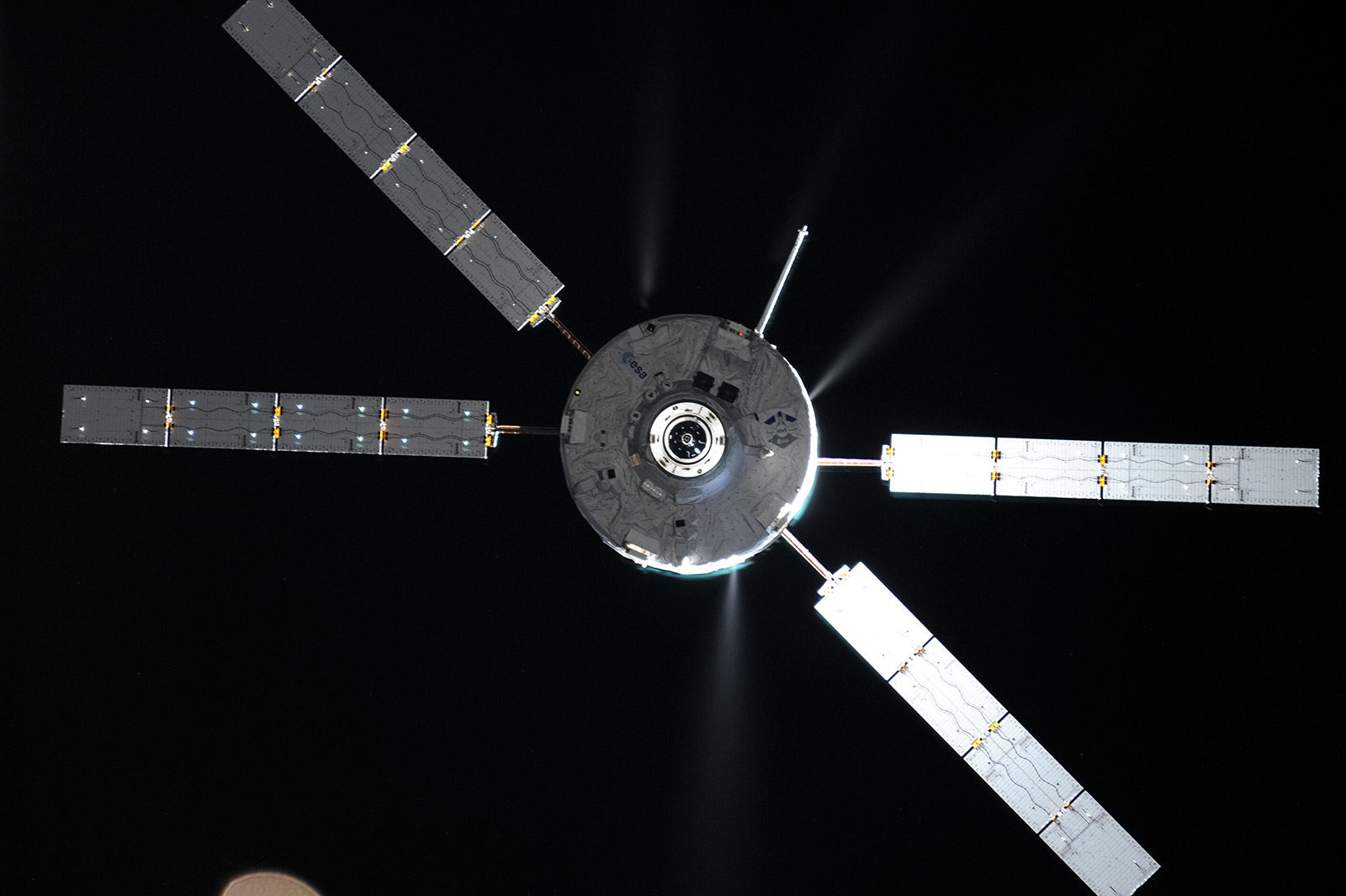 ATV blog archive
ATV blog archive