create

create

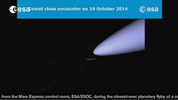
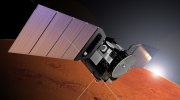
Mars Express rocking and rolling with NASA’s Curiosity & Opportunity
create
Tracking MSL: Media event at ESOC gallery
create
Nice note from NASAs’ MSL Mission Interface Manager
create
Audio recording: the sounds of an alien descent
create
REPLAY WEBCAST: Mars Express tracks MSL
create
MP3 audio: Mars Express voice check with NASA JPL
create
Time delay between Mars and Earth
create
Getting the data back – Store and Forward
create