
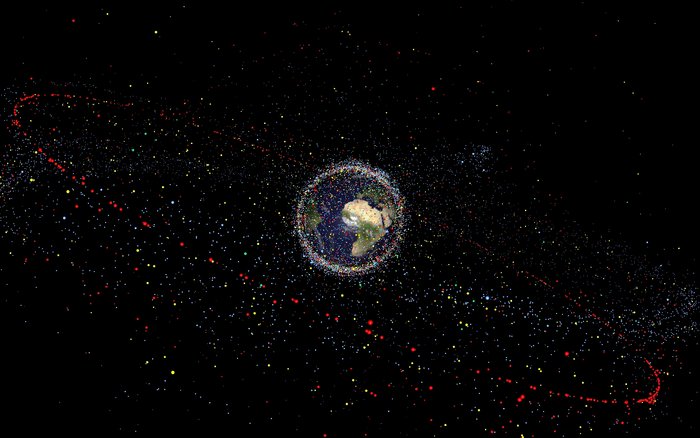
“It is humbling to think that space was a pure environment untouched by humans until we came and polluted it with old satellites. There are now 29 000 objects larger than 10 cm orbiting our planet, some as large as 10 metres. These objects are a hazard to spacecraft operators as they could damage and destroy operational satellites if undetected.”
With these words, in an open letter published on his blog, French ESA astronaut Thomas Pesquet addresses the threat represented by space debris, asking for immediate action: “Similar to climate change, we must act now and cannot wait until it is too late.”
At Clean Space we are on the same page, and we know, in fact, that the most effective way to stabilise the debris population in key orbits is to remove large items of debris from space. We are therefore planning the world’s first ever active debris removal mission, eDeorbit . Its goal is to capture a heavy, ESA-owned item of debris and remove it from an altitude of 800–1000 km in a near-polar orbit.
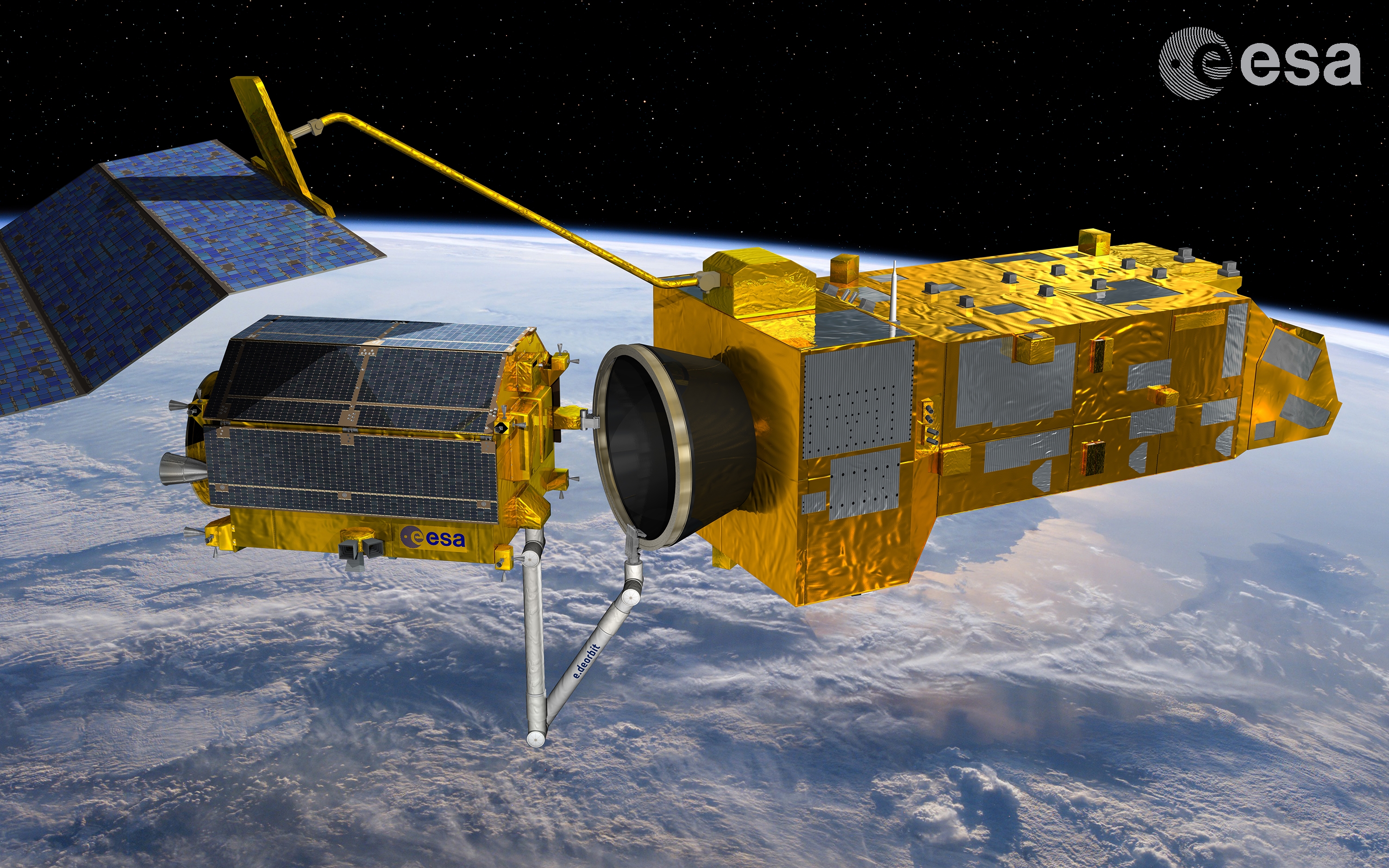
e.Deorbit clamping the target
Copyright: ESA-David Ducros
Back in July, we published an overview of this innovative project with our long-term goals and strategy to develop the technologies needed to approach and remove a big piece of space debris.
During the second half of 2016, we moved forward in many areas and oversaw a large number of technical studies:
- Together with companies such as Airbus, OHB, Thales and QinetiQ the project successfully completed a detailed review, the intermediate Systems Requirement Review (iSRR)
- Invitations to tender for preliminary breadboards of the Clamping Mechanism and the Gripper were released
- The implementation and management of a further 5 M€ of activities have continued
- A number of other activities such as ORCO – an on-ground validation of a rigid-combination (robotic) system, one of two activities to produce a first breadboard for a multispectral camera for e.Deorbit.
This past December, during ESA’s 2016 Ministerial Council, GSTP has been strongly supported with an overall funding of 445 million euro. Part of this funding can be used to move forward on the ‘e.Deorbit Maturation Phase’, where the goal is to carry on studies and activities to develop the hardware and sensors that will enable such a complex mission to come to fruition.
We have just published the Clean Space GSTP Compendium that describes the activities for 2017-2019 which we are asking funding for. You can read the GSTP Clean Space compendium on EMITS News; industry and delegations of GSTP Participating States can comment for further updates. For providing feedback, one has to follow the instructions provided in the cover letter
More specifically, the proposed activities comprise:
- Deorbit Preliminary Definition Phase (13.5 million euro) involving work to enhance the system design, with particular emphasis on communications, on-board autonomy, processing, control algorithms, accommodation of GNC and robotic equipment and the development of risk mitigation strategies, cost estimates and the master mission schedule
- e.Deorbit Robotics Subsystem (11.5 million eruro) We will develop the key robotic technologiesrequired for a robotic debris removal mission such as the robotic gripper, clamping mechanism, robotic arm, visual servoing system, and the capture and robotic control algorithms together with the associated test beds
- Deorbit GNC Subsystem: developing a LIDAR, a far range and close range camera, multispectral camera, infrared camera, 3-DOF camera together with the image recognition and processing for the selected sensor suite and the associated payload computer based on these processing demands
- Deorbit Net Subsystem: (6 Meuro) during which we’ll work on the key technologies required for a debris removal mission using a net, including verification and validation through a sounding rocket test
As mentioned above, the activities needed to develop these technologies are part of the compendium, and every company that is interested in working with us on them can express this interest by following the instructions specified in the cover note to the compendium.
“Advancements in several technology fields are necessary such as Advanced Image Processing Systems, Complex Guidance Navigation and Control (GNC) and Innovative Robotics,” says Robin Biesbroek, ESA’s study manager.
What makes all of this even more exciting is that the same technologies and developments are fundamental to perform various other in-orbit tasks such as: in-orbit servicing, cargo and satellite delivery (to be performed by a ‘space tug’) and in-orbit assembly. “Through the e.Deorbit mission, European suppliers would become global leaders for robotic and rendezvous technologies which could enable space tugs to become a reality”, concludes Biesbroek.
To know more about the content and to ask questions on the upcoming work, the Clean Space team would like to invite the European and Canadian industry to join a webinar on 23 February at 15:00 CET. Please register by sending an email to cleanspace@esa.int by 17 February 2017.
- Watch the video ‘e.Deorbit: the debris hunter‘
- Read more about e.Deorbit
- Find Thomas Pesquet’s open letter to Clean Space in English and in French
- Follow Clean Space on Twitter: @ESAcleanspace
- Check out the Clean Space GSTP Compendium and its cover letter
Discussion: no comments