
5 key points about eDeorbit:
1. e.Deorbit will be the first ever Active Debris Removal Mission
2. ADR missions are needed to stabilise the space debris environment
3. In line with the above need, the e.Deorbit Mission Goal is to capture a heavy, ESA-owned item of debris and remove it from an altitude of 800–1000 km in a near-polar orbit
4. This is a mission with large technical challenges driving the need for technology advancement of the following building blocks
– Advanced image processing
– Complex guidance navigation and control (GNC)
– Innovative robotics
5. These building blocks can used in various follow on missions through the versatile space tug which is a high priority of European Industry
Why Active Debris Removal?
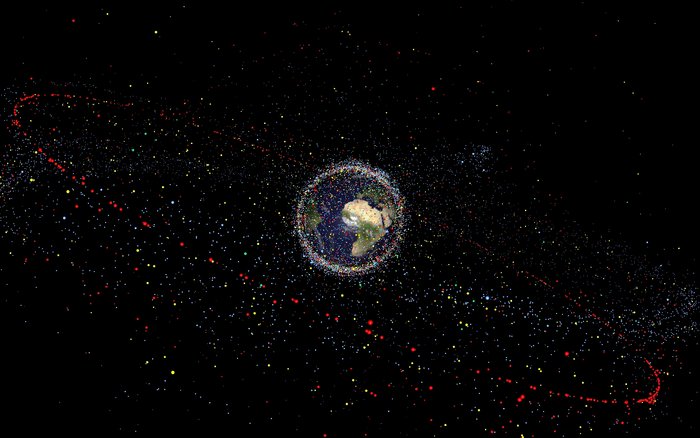
As of November 2015, more than 5100 launches had placed some 7200 satellites into orbit, of which about 4100 remained in space. Only a small fraction – about 1100 – are still operational today. These are accompanied by almost 2000 spent orbital rocket bodies and a large number of fragmentation debris, caused by the break-up of more than 200 objects, as well as mission related objects. This large amount of space hardware has a total mass of more than 8000 tonnes.
So here it is our planet, completely surrounded by this huge amount of objects with a size that varies from the one of a truck to the one of marble ball. All this junk that travels undisturbed in the orbits. Truth is that, even if all space launches were halted tomorrow, the amount of debris would continue increasing: levels of debris in low orbits are inexorably rising, mainly driven by collisions or explosions. The most effective way to stave off this chain reaction and stabilise the debris population in key orbits is to remove large items of debris from space.
e.Deorbit: The Mission and its Technical Challenges

eDeorbit: the first active debris removal mission
e.Deorbit will be the world’s first ever active debris removal mission. It’s goal is to capture a heavy, ESA-owned item of debris and remove it from an altitude of 800–1000 km in a near-polar orbit. This is a very challenging and inspiring mission which will see European industry taking a step up as the global leader in several technology fields are necessary, in particular the following:
Innovative robotics and capturing mechanisms are being studied in order to minimise the mission risk. After various system studies, two promising capture techniques are under development:
- Throw-nets seem to have a very large applicability to debris because they have the advantage of scalability which enables them to capture a large target.
- A robotic arm, with a gripper, has the capability to capture appendages on spacecraft.

Robotic Arm Capture of Large Debris
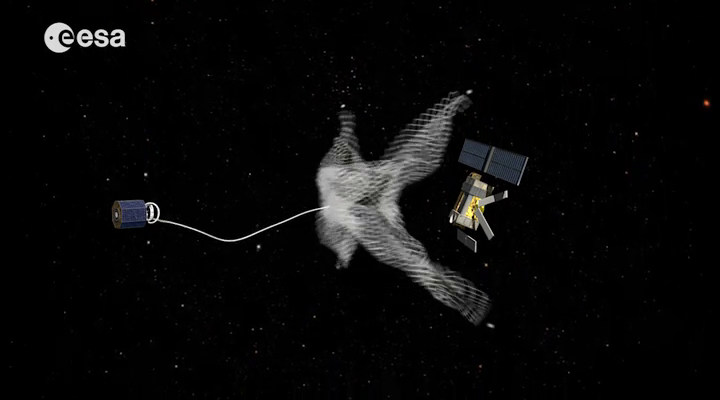
Net Capture of Large Debris
Advanced image processing systems are required to enable the extraction of dynamical and kinematical properties of the object. This will be performed on the inputs from sensors such as a LIDAR, multispectral camera, visual camera, and also within the visual serving system of the robotic arm.
Complex Guidance Navigation and Control (GNC) drives the need for intricate control algorithms which are fundamental to take the inputs from the image processing and, from this, actuate the spacecraft to ensure a safe and controlled synchronized approach to rendezvous with the debris whilst minimising the risk of collision.
A Competitive Advantage
All of these technologies are also needed to perform various important tasks in space such as: as in-orbit servicing, cargo and satellite delivery, in-orbit assembly. In fact, while demonstrating that it’s possible to remove a large debris from LEO, e.Deorbit will mature technology advancements which are fundamental for the creation of new services that are going to be provided by space tugs. European industry have indicated that Space Tugs are of high priority as they have the capacity to offer a wide range of services, such as:
- In-orbit servicing: Travelling from one spacecraft from another to provide fuel, replace a battery or fix a solar panel.
- Tugging of spacecraft from one region to another: For instance, from low earth orbit to the geostationary orbit, or from Earth orbit to a lunar orbit.
- In-orbit assembly: Placing several parts of a system together, such as attaching an antenna onto a spacecraft in-orbit.
All of these mission concepts / use cases require very similar technologies, as the functions they need to perform are very similar to one another: rendezvous and inspection, capture, and the complex control of two satellites or bodies connected in-orbit. As the functions are very similar, so too are the technologies required to perform the majority of these functions for the different Space Tugs such as a robotic capture interface, rendezvous sensors, image processing and control.
The Proposal for e.Deorbit
The e.Deorbit mission is presently in Phase B1 and the System Requirement Review will be held in October 2016. e.Deorbit will then be presented at the European Space Agency Ministerial Council in December this year for a decision on a ‘Maturation Phase’.
The e.Deorbit ‘Maturation Phase’ will consist of:
- Phase B2 Detailed System Design (13.5 M€) comprising of; a design of the platform and critical subsystems, together with ground segment engineering, launch segment engineering, product assurance and system engineering together with the identification of the verification processes in order to streamline the technology developments from a systems perspective.
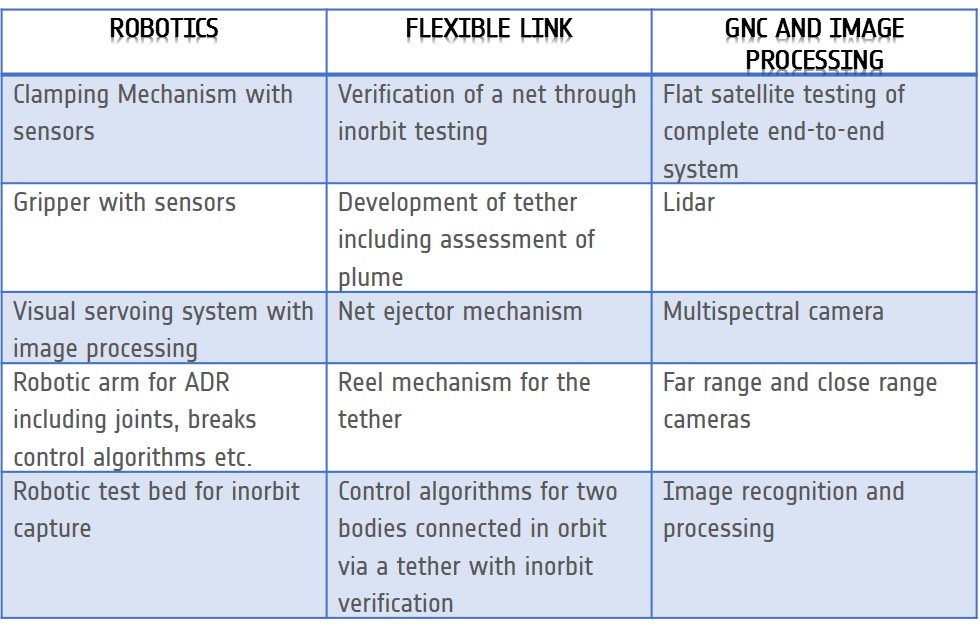
- Technology development of the key building blocks such as:
Robotics (11.5 M€)
Flexible Link (6 M€)
GNC and Image Processing (10 M€)
The Phase B2 and all technology developments will run in parallel to ensure the entire system reaches a mature stage, whereby e.Deorbit can be presented to the Ministerial Council in 2019 for a decision on implementation.

Through the e.Deorbit mission, European suppliers have the opportunity to become the global leaders for robotic and rendezvous technologies which could enable space tugs to become a reality, having first-mover advantage and with it, the ability to lead the new era of space services.
Discussion: one comment
¿Como puedo aportar mis ideas, para que las puedan contrastar los especialistas?