A very interesting annotated video (no audio) courtesy of ESA TV showing the critical steps taking place now that ATV is in orbit. The video covers the 8-day period from launch on 16 February up to docking, scheduled this week on 24 February. Scroll down to read explanation of annotations. Thanks, Martin!
EARLY OPERATIONS
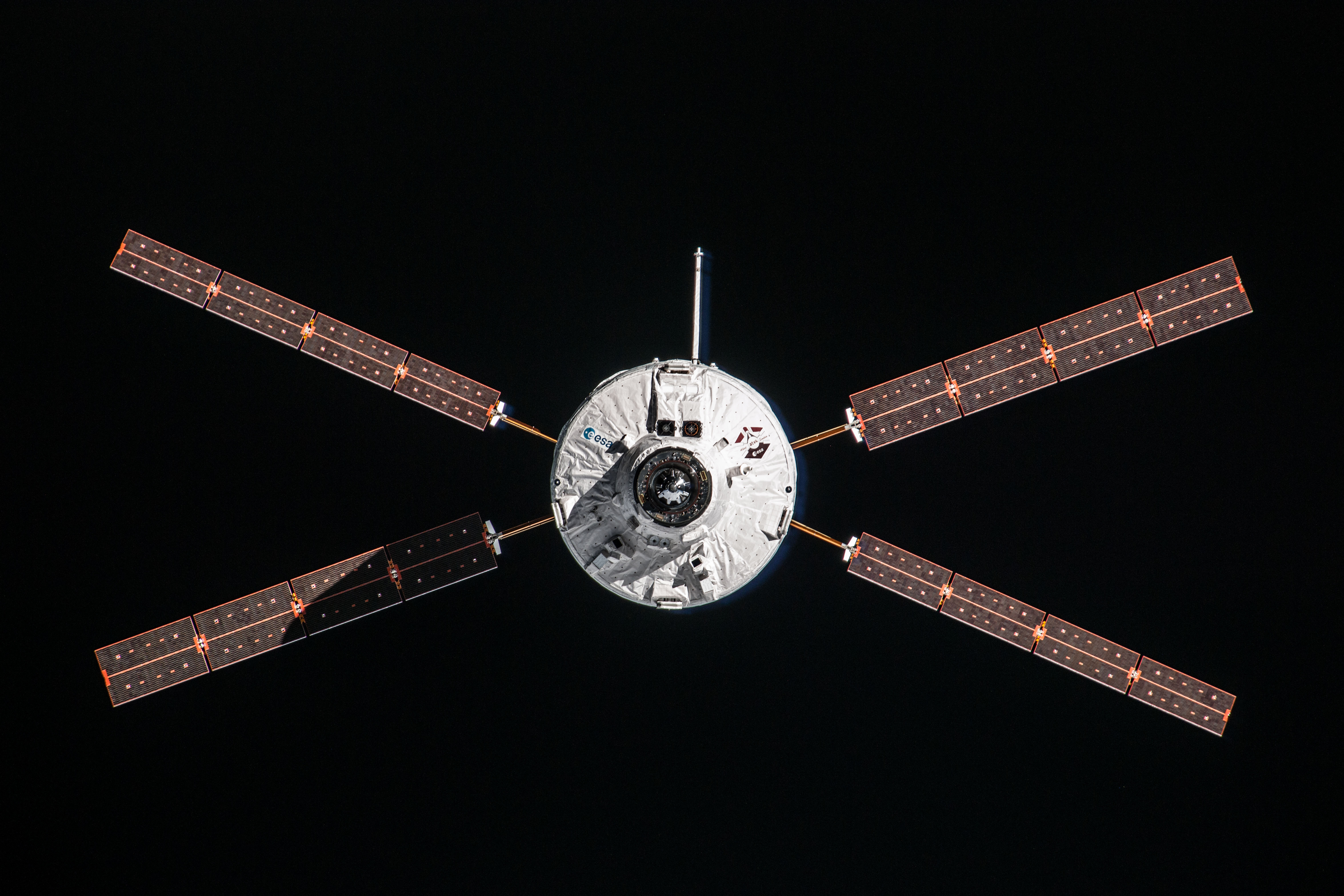
Start just a few minutes after separation from Ariane, high over Australia, ATV-2 is on an orbit at 260km altitude, ISS is higher at just over 350 km, but is no where near: it’s about 22,000 km away… that’s more than halfway around the globe. (dephased by 190°). Kourou has handed over control to ATV-CC in Toulouse. The satellite is being checked out, its precise orbit is being determined, and it unfurls its solar arrays to obtain power. Navigation begins: first with its star-trackers, then using the GPS constellation.
SYNCHRONISATION
In techie terms: ‘phasing the orbit’ – in short, adjusting ATV’s orbit so that it catches up, or is ‘synchronous’ with the ISS. The spacecraft will travel around the Earth many times, covering some 500,000 km. During this time, it is in yaw steering mode and navigating using GPS in absolute mode. At the end of this sequence lasting up to 24 February, ATV will be still at its 260 km high orbit, but now only 30 km away from ISS.
RENDEZVOUS
ATV now has a direct link to the ISS and switches to relative GPS, computing its position with that of the station. Space navigators call this phase ‘homing’. It includes raising ATV’s orbit to that of the ISS. ATV is piloting itself. It will fire its thrusters four times over a period of 46 minutes. At the end of this sequence it will be about 100 meters above the ISS.
CLOSING IN
More manoeuvres now during 40 minutes, with – we will see – four ‘S’ points (stopping points, or waypoints) up to the docking. The ISS service module camera is activated but the crew have to wait a bit to actually see the arriving visitor.
FINAL APPROACH
The ATV has arrived at a point some 250 m distance from the Space Station. Its most sophisticated navigation systems, video meters, are activated, with laser beams reflected off the ISS to calculate its position. Telemetry indicates 249 meters because the probe is one metro long. At this point two of the ATV’s solar arrays may be ‘feathered’ if the ISS camera is dazzled.
In parallel, the telegoniometers provide an independent source of information to the spacecraft’s calculation of its position. At last, the ATV is travelling in a straight line. At 20 meters, it activates relative attitude navigation so that it mirrors any fluctuations of the ISS.
No later than 10 minutes before docking, the ATV starts to cover the last 11 meters. There’s one stop for last-minute checks by ATV-CC and the ISS crew before receiving the final ‘GO’. These last eleven meters are covered in less than 4 minutes. Docking occurs when ATV and ISS are over mid-Atlantic.
 Automated Transfer Vehicle page
Automated Transfer Vehicle page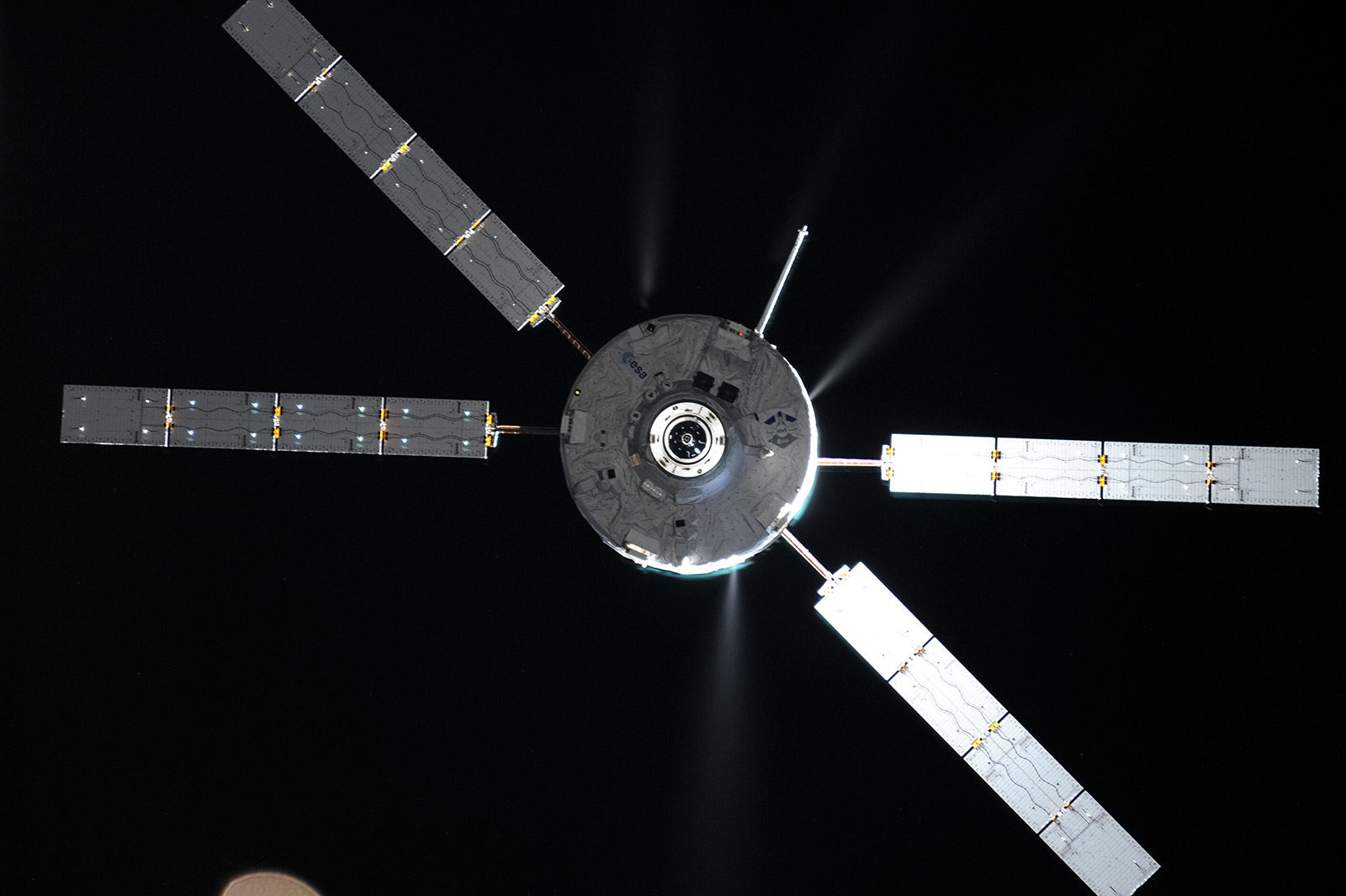 ATV blog archive
ATV blog archive
Discussion: one comment
Are there any othe people out there that see the feasibility of journeys beyond low Earth orbit with a larger craft constructed in LEO? The same way we built the ISS we could construct a larger craft in LEO using the same modular construction techniques developed during the construction of the ISS. This would give us a far better equiped vehicle for the further destinations. A larger craft built with modular construction would give a higher margin of safety. If one section of the hull was compromised, perhaps by a micro meteoroid that section could be sealed off and the crew could tranfer to the other moduals.. This would not be possible with the “All up in one shot deal”. A great deal of science opportunities would present themselves from an orbiting platform above the Moon, Mars, a geosynchronous orbit above the Earth or maybe an orbit of the sun from one of Earths longarian points. These platforms could be built in LEO using existing technology then flown to their destinations..