create

create
Powering Artemis in 2024
create
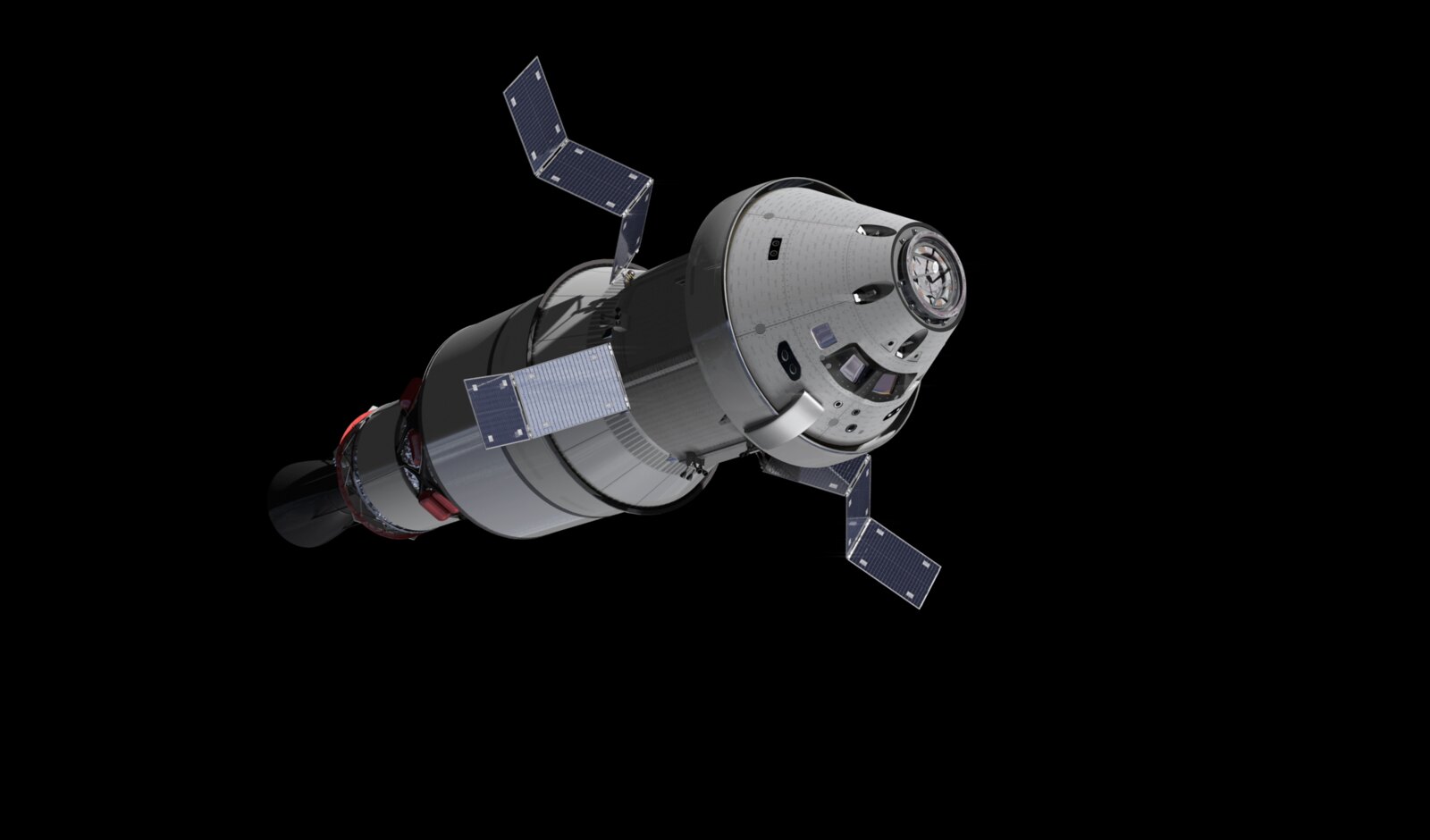
Service Module, assemble!
create
Artemis II: Orion complete
create

Radiation rangers: what two mannequins learned on Artemis I
create
Meet the team: Anna Chrobry
create
Artemis III: a historic engine
create
Artemis II: no pressure
create
Artemis II: electromagnetic testing, the Apollo way
create
Meet the team: Jan‑Henrik Horstmann
create
Powering Artemis in 2023
create
Meet the team: project manager Philippe
create
Artemis I: how our engineers solve problems
create

Top 5 moments of Europe’s ride for Artemis I
create
Artemis II: turning Orion on
create
Artemis II (almost) complete!
create

European Service Module-6 structure ready for integration
create
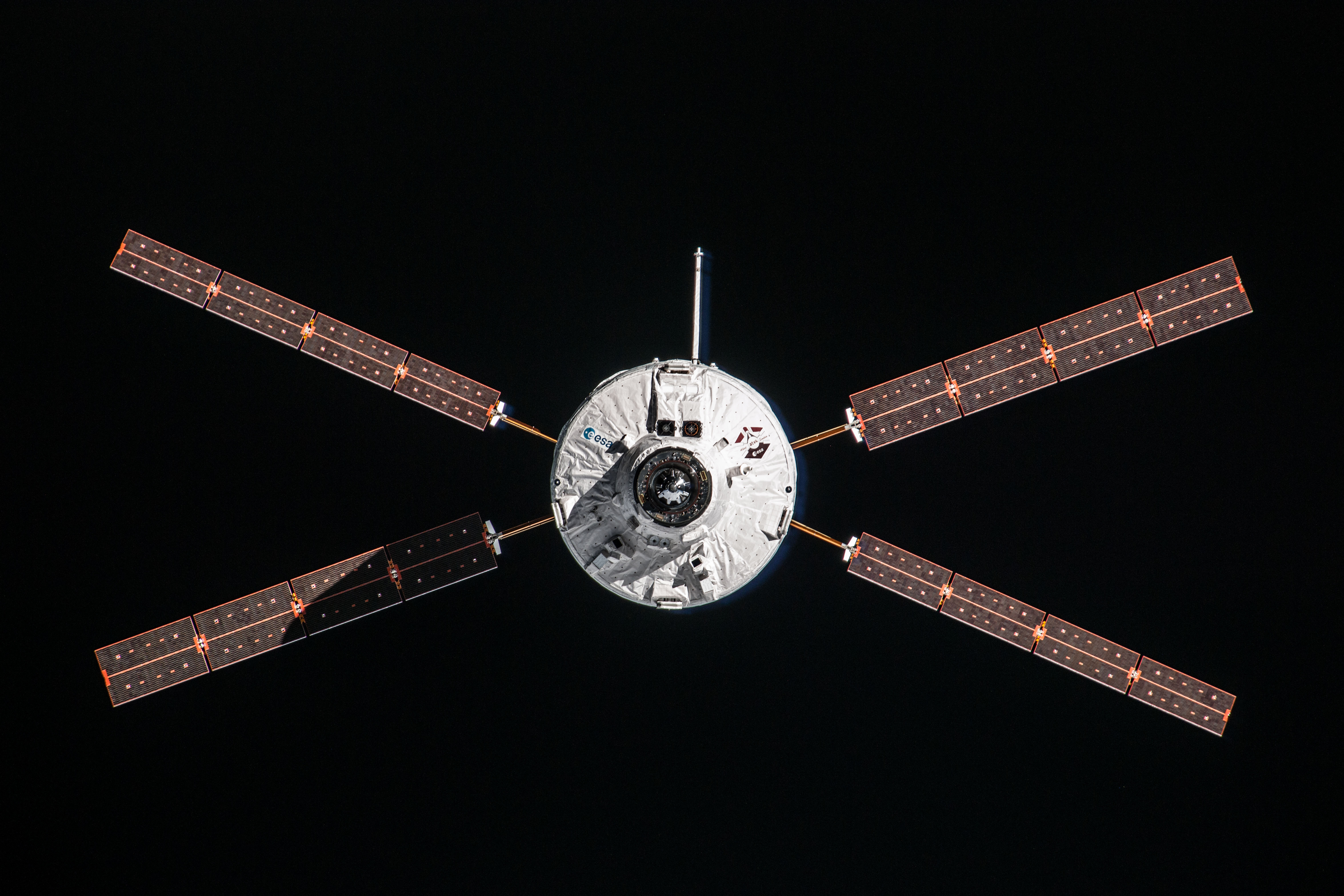 Automated Transfer Vehicle page
Automated Transfer Vehicle page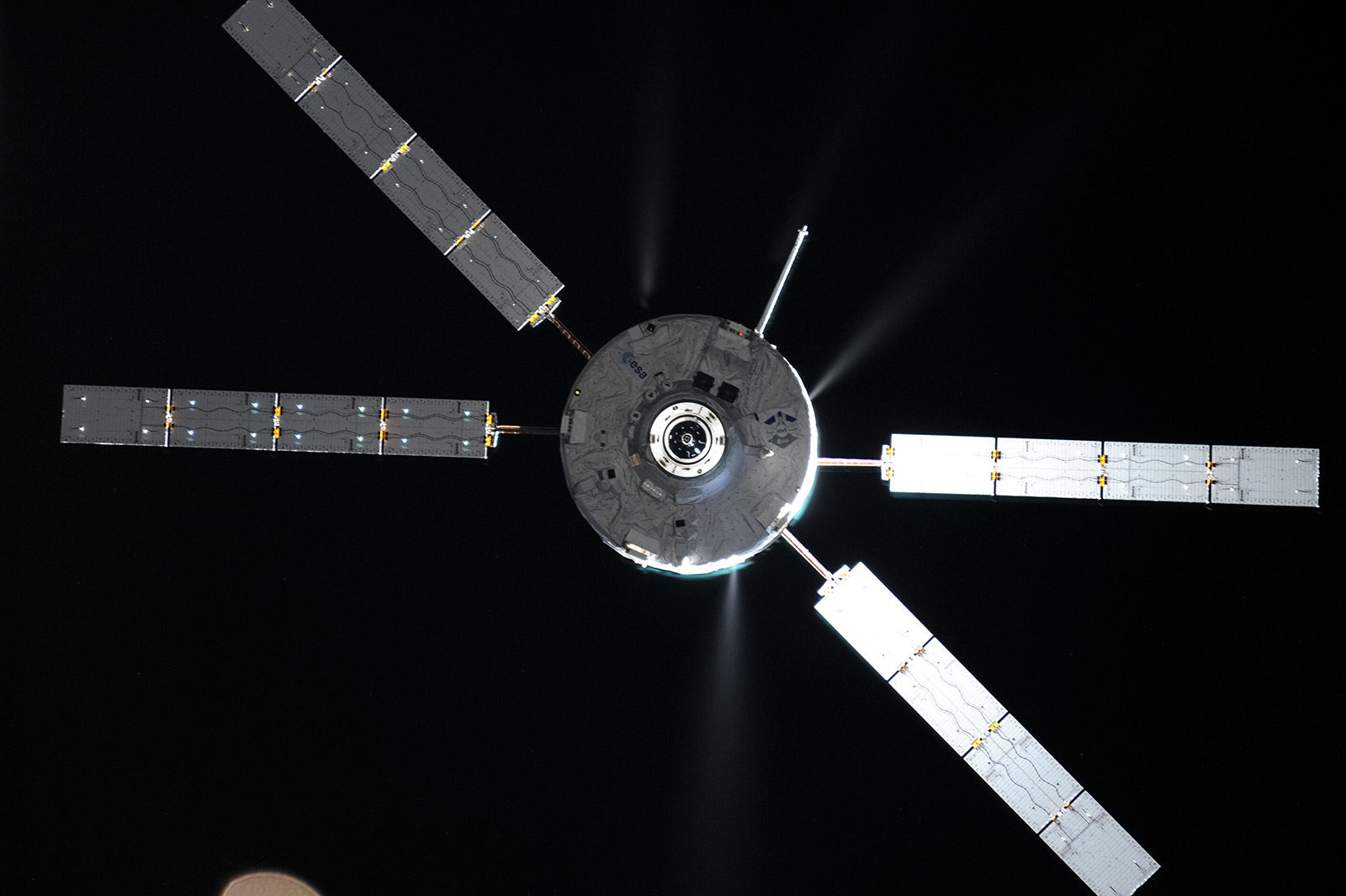 ATV blog archive
ATV blog archive